![]()
Wymiary:
- Skala: 1/90
- Długość: 1225 mm
- Wyporność: 10.5 kg, w zanurzeniu: 11.5 kg
- typ: statycznie zanurzający się (T-max)
Budowa:
Stocznia rozpoczęła budowę 05 lutego 2016 roku
Stocznia zakończyła budowę 1 czerwca 2017
Dziewiczy rejs odbył się 10.09.2018 roku w Bratysławie na Sub Regatta 2018

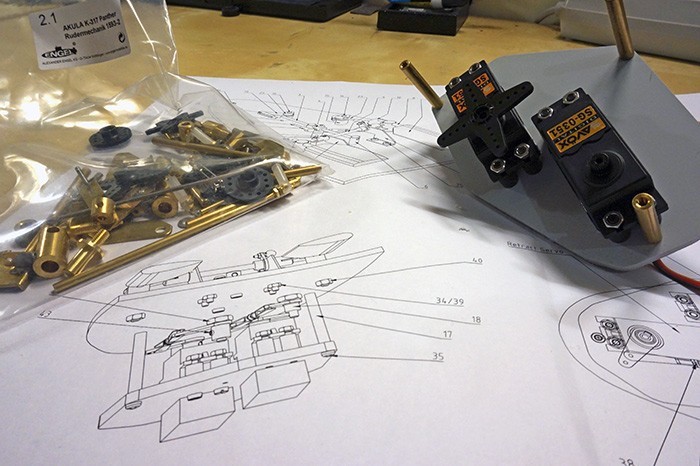
Jest to zestaw niemieckiej firmy Engel. Są to zestawy bardzo rzadkie, głównie z powodu ceny oraz olbrzymiego stopnia trudności i wymagań co do wyposażenia warsztatu. Relacje z ich budowy są zwykle bardzo przydatne dla innych, szczególnie początkujących, modelarzy podwodnych lub zaawansowanych, ale składających swoje cacka od zera. Model oczywiście RC z systemem zanurzenia sterowanym mikroprocesorowo – Tmax. Model oczywiście rozszerzony o przednie, funkcjonujące i chowane stery głębokości, wysuwane peryskopy. Trafił w moje ręce w grudniu 2015 r. jako prezent gwiazdkowy od Pani Admirał i na razie wygląda tak:
Nie są to wszystkie części – na pewno brakuje całego osprzętu RC – 3 serw, regulatora oraz odbiornika z dekoderem, plus drobnostek typu rurki, cięgna i detale kadłuba.
Ciekawostka:
Według nazewnictwa radzieckiego „Akula” to zupełnie inny okręt – prawie 200 metrowy „Typhoon” („Typhoon” to nazewnictwo NATO).
Natomiast „Akula” to klasa nadana przez NATO właśnie dla Szczuki…
…ale…
Jedna z jednostek typu Szczuka-B nosiła imię: „Akula”…
Prawda, że proste? 😉

Początek budowy wymaga trochę siły – sprawdziłem jak połówki pasują do siebie. Oczywiście nie pasują w ogóle jeśli potwornie się ich nie ściśnie, ale jest znacznie lepiej niż było przy Typhoonie. Użyłem bardzo mocnej taśmy by dopasować górną i dolną połówkę ze sobą – na razie tylko dla testów no i trochę w ramach motywacji :).
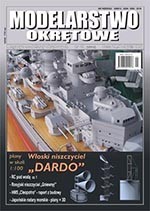
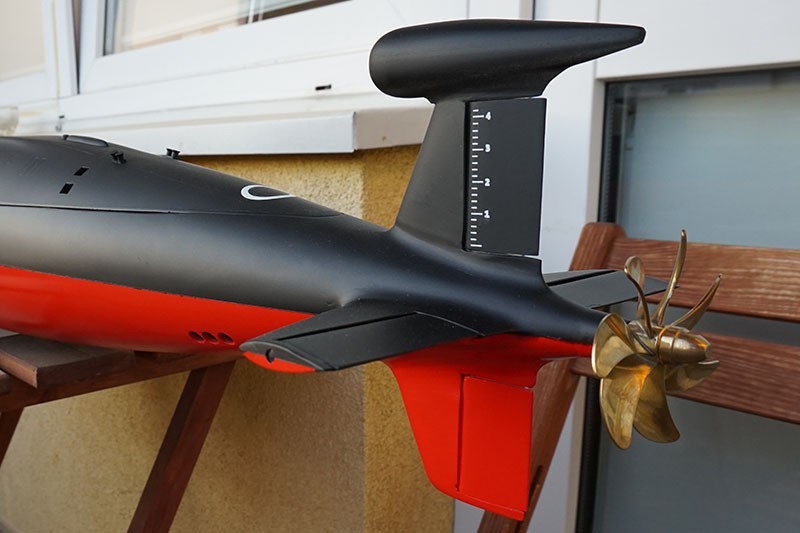
Ołówek dla skali.
Wycinanie otworów przelewowych.
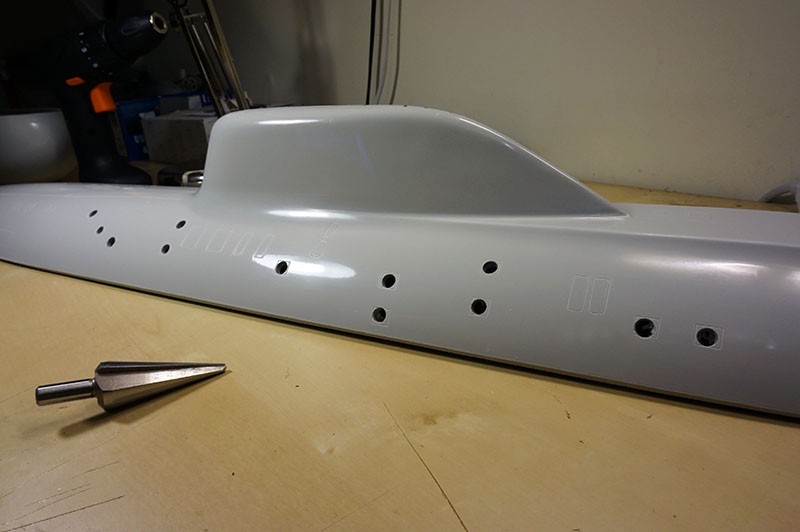
W pierwszej kolejności zabrałem się za wycinanie otworów przelewowych w górnej części kadłuba. Najpierw wywierciłem sobie otwory „prowadzące” – wiertło 1,5mm. Następnie każdy otwór został poszerzony rozwiertakiem. Czemu nie wiertłem? Wiertło, nawet bardzo ostre powoduje odpryski na „glazurce”, miałbym o wiele więcej roboty przy szpachlowaniu. Oczywiście rozwiertak potrafi czasem zejść z kursu, ale to nic, czego nie można by było potem naprawić żywicą czy szpachlą. Potem mozolna praca iglakami w celu zamiany okrągłych otworów w kwadraty lub prostokąty. Mówiąc szczerze, lubię ten etap budowy. Jest w tym coś uspokajającego. Jedyną wadą takich prac, jest gryzący pył. Widać także otwór na wysuwane dziobowe stery głębokości.
 |  | 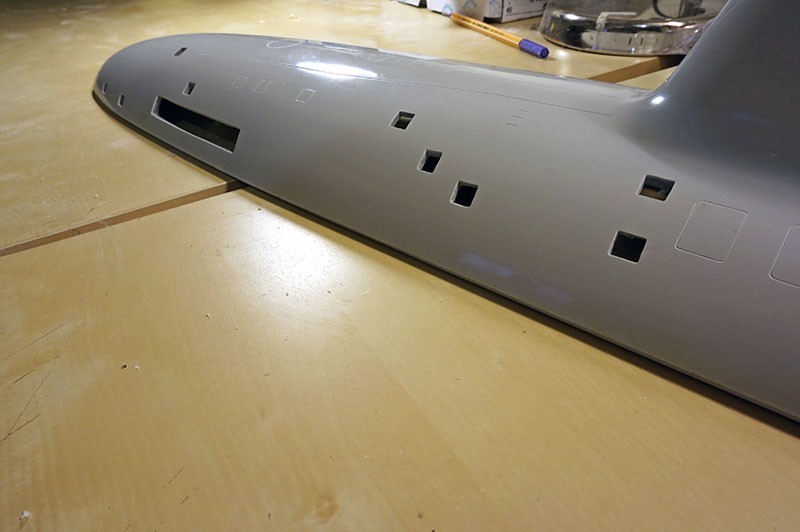 |
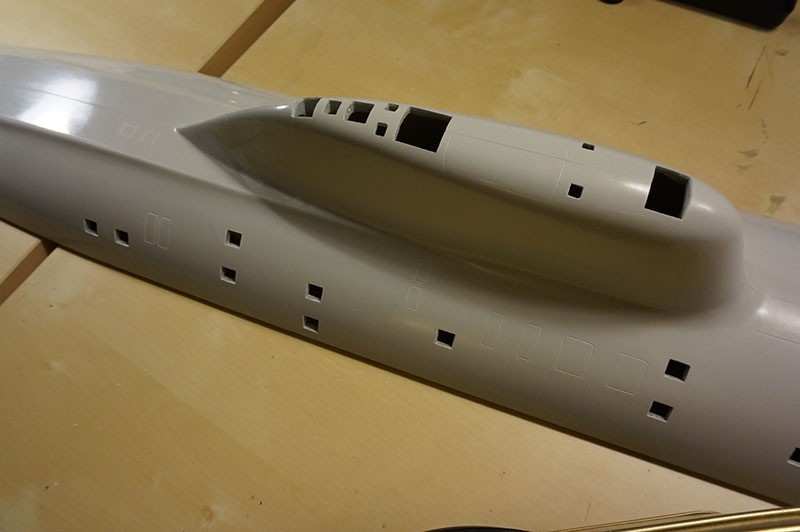
Na koniec zostawiłem wycinanie otworów w kiosku. Są to bardzo ważne otwory z dwóch powodów, pierwszy – otwory dla mechanizmów wysuwania peryskopów i anten. Drugi – odpowietrzanie kadłuba mokrego podczas zanurzenia. Nie spodziewałem się, że będzie to najcięższa część piłowania. Laminat na łączeniach jest wyjątkowo (nonsensownie?) gruby i bardzo twardy. W sumie sam kiosk zajął mi tyle samo czasu, co obydwie strony kadłuba… Umieszczam to w swojej relacji, żeby uprzedzić wszystkich, którzy będą składać ten model po mnie. DOBREJ jakości pilniki to podstawa, i koniecznie trzeba zaopatrzyć się w kwadratowy i prostokątny – najlepiej po dwa.
Stery rufowe.
Montaż sterów i ich wewnętrznych mechanizmów należało zacząć od przycięcia pod wymiar osi i nawiercenia pod nie sterów. Jest to proces trudny i niebezpieczny, gdyż stery mają około 7-8mm grubości, a wymagają nawiercenia ich wiertłem 4mm. Wiertarka stołowa jest niezbędna. Następnie należy osie wbić w stery. Ja dla bezpieczeństwa dodaje też trochę rzadkiej żywicy do wywierconego otworu. Utrudnia to proces wbijania osi, ale tworzy niemal niezniszczalną kombinację na lata.
Engel sugeruje, aby osie sterów obracały się bezpośrednio w laminacie. To BARDZO zły pomysł. Postanowiłem wywiercić w kadłubie otwory o średnicy 5mm, aby można było w nie wkleić rurki mosiężne, które będą pełnić funkcję łożysk ślizgowych. Wyszło czysto i schludnie.
 |  |  |  |
Wszystko udało się wykonać prostopadle – wszystkie osie spotykały się na środku pod kątem prostym. Mogłem przejść do następnego etapu budowy, którym był montaż dźwigien obracających sterami. Schemat z instrukcji wydaje się z początku skomplikowany, ale to nie jest żadnym problemem. Trudnością natomiast okazała się ilość miejsca jaką dysponujemy na mechanizm sterów. Szczególnie, że przez sam jego środek przebiega jeszcze wał napędowy.
Zanim przystąpiłem do ostatecznego mocowania ruchomej części sterów, wszystko jeszcze raz przymierzyłem i odkryłem, że Engel robiąc model, kopiował go tak wiernie, że skopiował także pewien błąd konstrukcyjny. No dobra, to co więc schrzanili panowie z biura projektowego Rubin?
Otóż dolny ster kierunku zaprojektowali tak, że jest dłuższy niż kil (wystaje poniżej). Przy jednostkach nawodnych nie ma to aż takiego znaczenia, jednakże okręty podwodne mogą osiąść na dnie, a wtedy spora część masy okrętu spocznie na sterze. W sieci można znaleźć wypowiedzi marynarzy, którzy służąc na Sczukach skarżyli się na częste awarie tego elementu. Coś w tym może być, bo wszystkie późniejsze projekty tego biura, mają stery kierunku niesymetryczne – dolne są często krótsze w pionie, ale dłuższe w poziomie.
W przypadku modelu sytuacja jest jeszcze gorsza. Modele BARDZO często osiadają na dnie, lub zdarza się im się otrzeć o dno zbiornika. Do tego często pływają w zbiornikach z twardym sztucznym dnem (baseny, sadzawki w parkach). Bardzo łatwo będzie taki ster uszkodzić lub ułamać.
A że główna zasada w modelarstwie podwodnym mówi… „Jeśli coś może się popsuć to popsuje się na pewno (i to w czasie zanurzenia.)” … no to element poszedł do modyfikacji.

Po lewej ster przed modyfikacją, wyraźnie widać, że cześć całej masy modelu (12kg!) spocznie na dolnym sterze kierunku, zostawienie tego w taki sposób zakończyłoby się ciągłymi otarciami, a w końcu całkowitym ułamaniem lub wygięciem steru. Po prawej natomiast ster już przycięty, z uwzględnieniem jeszcze jego dolnej osłonki (jakieś dodatkowe 2mm).
Do wypełnienia szpar pod nieruchomymi częściami sterów została wykorzystana Poxilina. Jest to bardzo przydatne narzędzie dla modelarza i łatwo nad nim zapanować, klei i nadaje się do szlifowania, do tego w ogóle nie cieknie w przeciwieństwie do tradycyjnych żywic.
 |  |  |  |
Niektóre stery (obrazek drugi od lewej, powyżej) wymagały nałożenia jakiś 3mm żywicy, żeby podnieść przedni element steru, bo był po prostu za mały…Ogólnie jakość elementów żywicznych zestawu jest dużo gorsza, niż ta z Typhoona.


Na koniec wszystko zostało zeszlifowane na gładko, aby po malowaniu nie było widać żadnych szczelin, ani nierówności. Po lewej dolny ster, po prawej natomiast górny z charakterystyczną dla Akuli „bulwą” kryjącą w oryginalnych jednostkach sonar na kablu (lub cholera wie co jeszcze  ).
).
„Middle Deck” – Czyli pokład pośredni hermetycznej części modelu.
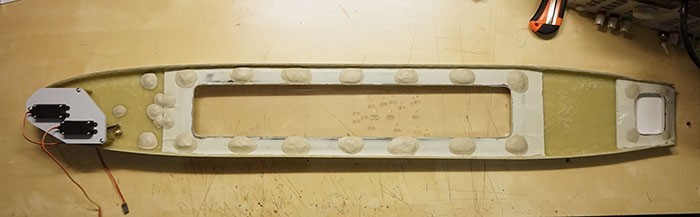
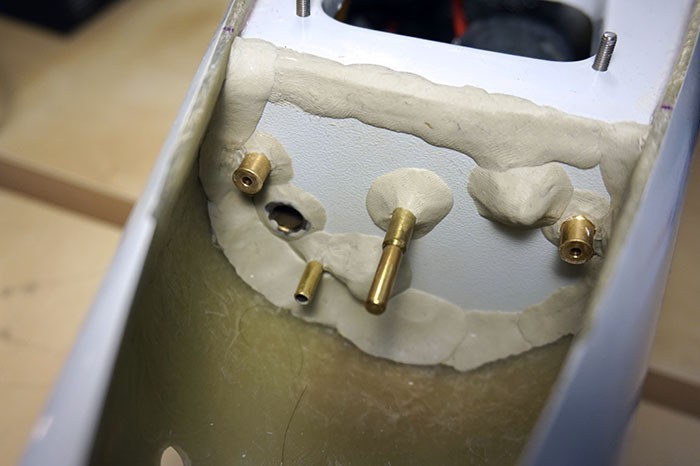
Tymczasem, przed montażem sekcji uszczelniającej trzeba przy niej popracować. Biały pokład musi zostać nawiercony, nafaszerowany różnymi śrubami, których łby będzie trzeba uszczelnić. Dużo precyzyjnego wiercenia. Na koniec pokład trzeba przykleić żywicą do dolnej połówki kadłuba. Potrzebna będzie także przykrywka – oryginalny pomysł zakłada taką oto stalową pokrywę, którą przykręcać się będzie śrubami M4.

Rozwiązanie Engela jest delikatnie mówiąc „nietrafione”, nie tylko hamuje to transmisje radiową, ale także wprowadza zakłócenia do instalacji. Do tego nigdy nie wiemy co się dzieje w modelu, czy czasem nie podcieka, czy coś nie obluzowało itp. Pomijam aspekt wizualny.

Do tej stalowej płyty, montuje się także mechanizm podnoszenia i opuszczania anten oraz peryskopów. Engel dostarcza dokładny opis, gdzie i jak należy nawiercić stalową płytę. Trochę tego jest. rozmiary otworów wahają się od 2mm do 4,2mm.
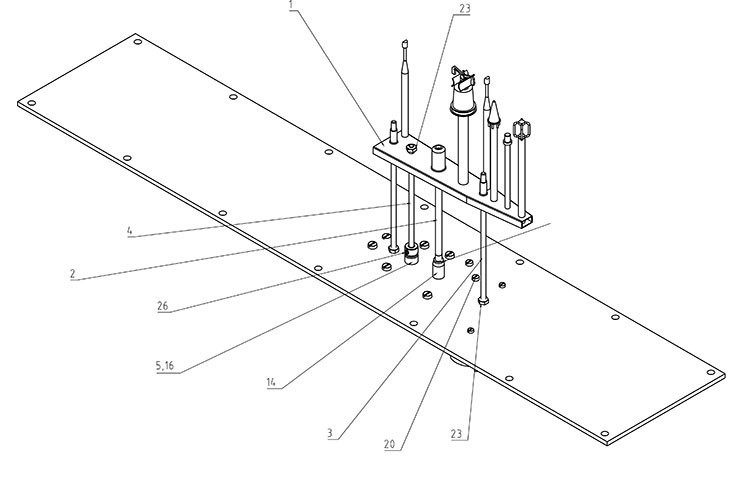
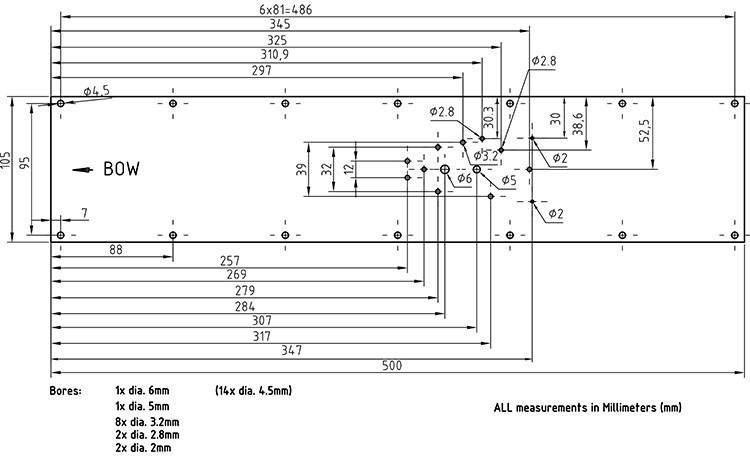
Dlatego jeśli już się męczyć z dokładnym odmierzaniem, to warto to zrobić raz, a porządnie. Podobnie jak w przypadku poprzedniego modelu tej firmy stalową płytę wypierniczyłem i zastąpiłem ją delikatnie grubszym, ale przezroczystym poliwęglanem. Po skręceniu będzie to wyglądać O WIELE lepiej. Będzie też o wiele lepsze w użytkowaniu i kontroli hermetyczności.

 Mając rozwiązany ten problem mogłem zająć się nawiercaniem pokładu pośredniego. Potrzeba naprawdę wiele dziur o różnych średnicach. Zacząłem od otworów pod śruby 4mm, które będą dociskały poliwęglanowego okno. Potem otwory mechanizmu anten i peryskopów.
Mając rozwiązany ten problem mogłem zająć się nawiercaniem pokładu pośredniego. Potrzeba naprawdę wiele dziur o różnych średnicach. Zacząłem od otworów pod śruby 4mm, które będą dociskały poliwęglanowego okno. Potem otwory mechanizmu anten i peryskopów.
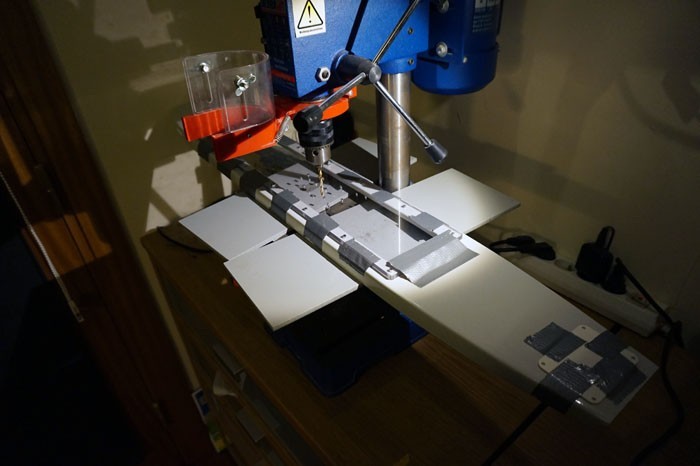
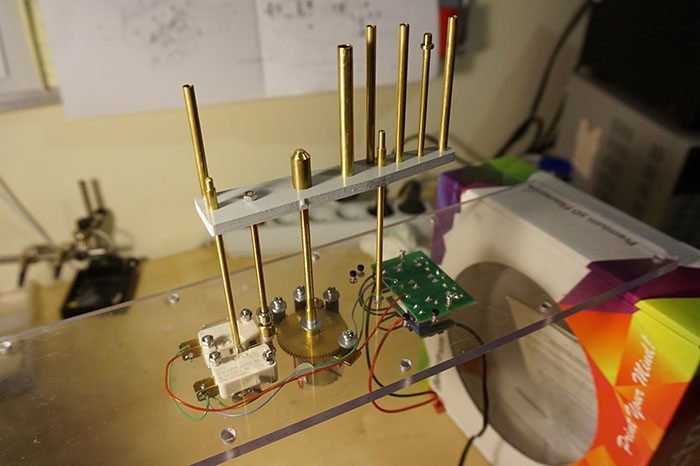
Dziobowe, chowane stery głębokości:
Niestety przy otworach potrzebnych pod mechanizm przednich, składanych sterów głębokości już tak łatwo z odmierzaniem nie było, trzeba było wziąć cyrkiel, ekierkę i trochę wypić, żeby wszystko było symetrycznie, liniowo i w dobrych odstępach :
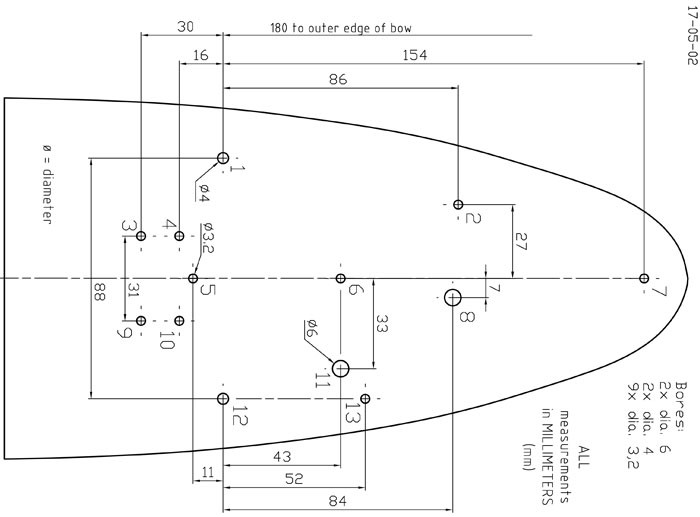
Na szczęście efekt łagodzi trudy, wygląda to wszystko naprawdę DOBRZE:

Polutowany, skręcony i złożony mechanizm w pozycji „stery schowane” (po lewej) oraz w pozycji „stery wysunięte” (prawe zdjęcie). By całość działała płynnie i lekko wszystko dobrze jest wyszlifować papierem ściernym typu 800.


Elektronika dziobowych sterów głębokości:
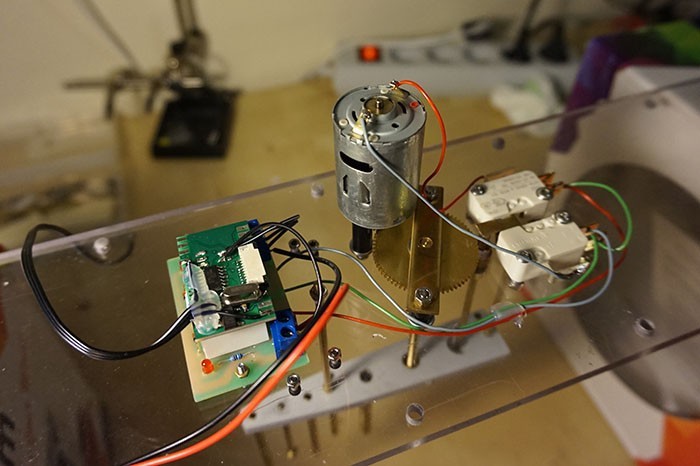
 Nie od wczoraj wiem, że Engel pod względem niektórych rozwiązań jest nadal we wczesnych latach 90, ale to już lekkie przegięcie. Widząc moduł kontroli wysuwania i chowania przednich sterów głębokości pomyślałem, że działa to tak:
Nie od wczoraj wiem, że Engel pod względem niektórych rozwiązań jest nadal we wczesnych latach 90, ale to już lekkie przegięcie. Widząc moduł kontroli wysuwania i chowania przednich sterów głębokości pomyślałem, że działa to tak:
Pod jeden kabel podpinamy kanał z odbiornika, który będzie składał lub rozkładał stery, a pod drugi podłączamy kanał, który odpowiada za kontrole sterów góra-dół. Proste?
Tak nie jest…
Jeden kabel, owszem służy do kontroli sterów-góra dół, ale drugi jest tylko do ustawienia punktów krańcowych (endpointów) serwa mechanizmu składania, potem należy go odpiąć i zostawić. Paranoja! To czy stery są wysunięte lub schowane zależy od tego czy pod specjalnym pinem jest podpięta GND lub nie. Oczywiście Engel zaleca dokupienie odpowiedniego modułu, który po wpięciu do kanału odbiornika (sic!) będzię tą GND załączał/wyłączał.
Można zrobić jakiś przełącznik na serwie, który będzie tę masę podawał. Ja jednak do sprawy podszedłem bardziej kompleksowo i na bazie Arduino pro mini, stworzyłem swój kontroler sterów:
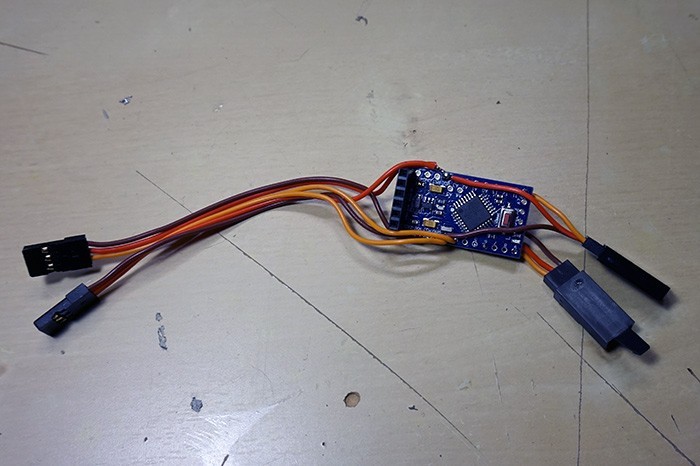 Polutować kabelki potrafi każdy głupi, dlatego największym wyzwaniem był program.
Polutować kabelki potrafi każdy głupi, dlatego największym wyzwaniem był program.
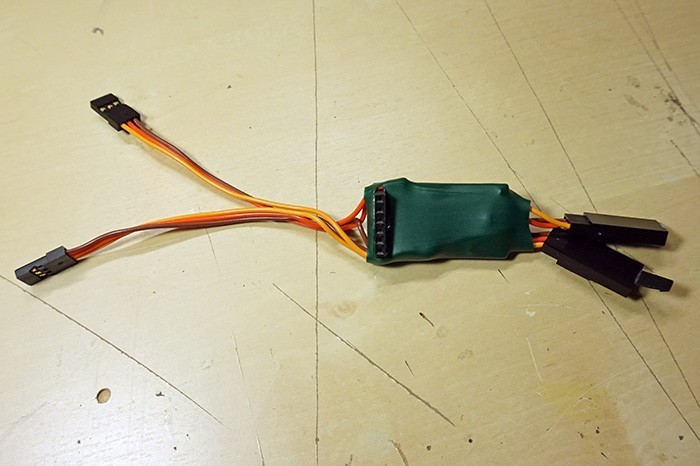
No więc, po dwóch długich wieczorach i jakiś 4 litrach piwa, powstał kontroler sterów, który posiada następujące funkcje:
1. Wysuwa stery głębokości w zwolnionym tempie
2. Po pełnym wysunięciu uruchamia drugie serwo – serwo obracające stery.
3. Po odebraniu komendy chowania sterów, ustawia on stery w pozycji neutrum.
4. Odczekuje chwilkę i wyłącza serwo obracające stery.
5. Chowa stery w zwolnionym tempie.
 Sterownik obsługuje
Sterownik obsługuje
– bezpośrednie podpinanie pod odbiornik poprzez dwa kanały.
– spowolnienie ruchu składania i rozkładania.
– płynny wybór czasu spowolnienia przez użytkownika!
– po odebraniu komendy „schowaj”, stery automatycznie układają się do neutrum i chowają.
– blokada serwa operującego serwami, gdy stery są złożone.
– neutrum przy chowaniu i netrum podczas pracy to dwa różne położenia (nie muszą być, ale mogą).
– punkty krańcowe (end pointy) ustawiane bezpośrednio z programu lub z radia.
Myślę, że program może się nadawać do wielu innych aplikacji, więc warto coś takiego mieć na dysku.
Jeśli pojawiliby się chętni na taki program, do celów inne niż komercyjne, to zapraszam.
Jeden film jest wart tysiąc słów, więc poniżej prezentacja mechanizmu opartego o swój sterownik:
Wklejanie „Middle deck” – pokładu pośredniego.
Wszelkie śruby i pręty przechodzące na wylot zostały zaklejone i zabezpieczone przed przeciekaniem. To już ostatni raz kiedy mogę oglądać środkowy pokład z tej strony. Sprawdziłem wszystko chyba z dziesięć razy. Czas na permanentny montaż do dolnego pokładu.
 Pokład musi zostać sklejony żywicą z dolną częścią kadłuba. Jest to moment krytyczny, gdyż wklejenie pokładu za nisko spowoduje iż nie zmieszczą się dwa pól litrowe zbiorniki balastowe ( i to byłaby mogiła), natomiast wklejenie pokładu za wysoko spowoduje niedomykanie się górnej połówki kadłuba, nieprawidłową linię wodną oraz kilka innych mniejszych i większych problemów… To właśnie ten etap budowy powoduje, iż mimo Akula jest jednym z najstarszych modeli firmy Engel, to sprzedaje się dość słabo (w porównaniu do innych modeli podwodnych Engela).
Pokład musi zostać sklejony żywicą z dolną częścią kadłuba. Jest to moment krytyczny, gdyż wklejenie pokładu za nisko spowoduje iż nie zmieszczą się dwa pól litrowe zbiorniki balastowe ( i to byłaby mogiła), natomiast wklejenie pokładu za wysoko spowoduje niedomykanie się górnej połówki kadłuba, nieprawidłową linię wodną oraz kilka innych mniejszych i większych problemów… To właśnie ten etap budowy powoduje, iż mimo Akula jest jednym z najstarszych modeli firmy Engel, to sprzedaje się dość słabo (w porównaniu do innych modeli podwodnych Engela).
Pokład pośredni należy wkleić dokładnie 3mm poniżej krawędzi kadłuba (na całej jego linii) zalewając go obficie żywicą, więc szans na poprawki nie ma. Trzeba to zrobić dobrze za pierwszym razem. Naprawdę warto dobrze się przygotować!
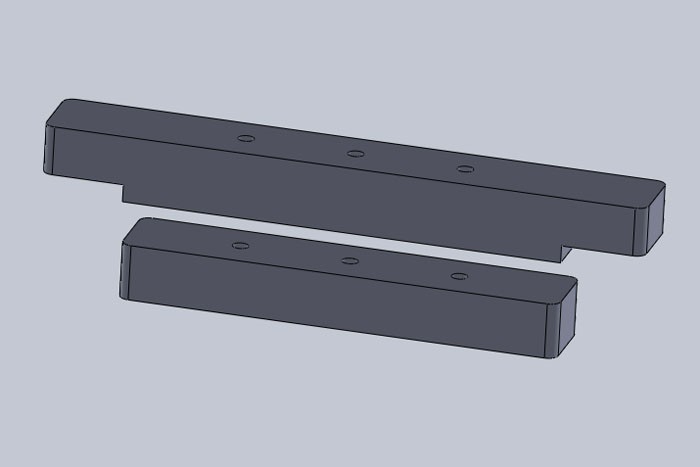
Dlatego ja, jeszcze przed wierceniem pokładu zaprojektowałem sobie taki oto pomocny element. Dolny schodek wystający od dołu tej górnej części ma dokładnie 3mm. Cały element nazwałem po prostu „pomocnikiem”.
Działa to bardzo prosto, po prostu przykręcę się go do „middle deck-a” i opiera o dolną połówkę kadłuba. Docelowo skorzystałem z trzech takich pomocników. Wszystkie zostały wydrukowane na drukarce 3d w zwykłym PLA.
Gdy pokład pośredni wisiał sobie stabilnie na pomocnikach, dokleiłem wsporniki i blokady, które po usunięciu „pomocników” utrzymają pokład pośredni na właściwym miejscu, a przed docelowym wklejeniem umożliwiają mi jeszcze jego swobodne wkładanie i wyjmowanie – w razie potrzeby jeszcze jakiś korekt.

Wklejanie middle deck i praca z ciekłą żywicą:
Dzięki odpowiedniemu przygotowaniu udało się to zrobić równo i w miarę ładnie. Żywica wymieszana z mikrobalonem była nakładana strzykawką o pojemności 2ml… Potem chwila aż wcieknie w szpary i następna porcja, proces ten powtórzyłem 5 warstwami aż cała szpara została szczelnie zaklejona. Jakieś 12 godzin pracy rozłożone na pięć dni . Niezbędnymi narzędziami okazały się strzykawki, szara taśma do uszczelnienia pokładu od spodu, żeby żywica nie wyciekała przed zastygnięciem oraz ściski stolarskie.

Zdjęcia z bliska pokazują jak precyzyjna jest to robota. Rowek musi być równy, aby warga górnej połówki miała w co się wsunąć. Nadmiar żywicy musi być więc sukcesywnie usuwany.


Całość jest teraz twarda i sztywna i twarda jak kamień.
 Przy okazji prac z żywicą postanowiłem też wkleić balast. Śrut został zalany żywicą, więc na polowanie się już raczej nie nada, ułożony i wygładzano do wysokości 8mm. Te owe 8mm jest równie ważne jak wcześniejsze 3mm, a dlaczego pokażę w dalszym etapie budowy . Wykorzystałem 1800 gramów i niestety okażę się to później za małą ilością.
Przy okazji prac z żywicą postanowiłem też wkleić balast. Śrut został zalany żywicą, więc na polowanie się już raczej nie nada, ułożony i wygładzano do wysokości 8mm. Te owe 8mm jest równie ważne jak wcześniejsze 3mm, a dlaczego pokażę w dalszym etapie budowy . Wykorzystałem 1800 gramów i niestety okażę się to później za małą ilością.

Gródź rufowa i montaż układu napędowego:
Gródź została wycięta z dostarczonego z zestawem kwadratowego kawałka laminatu. Najpierw zrobiłem sobie kartonową kształtkę metodą prób i błędów. Potem chwyciłem za wyrzynarkę i ku uciesze żony zapyliłem pół domostwa.
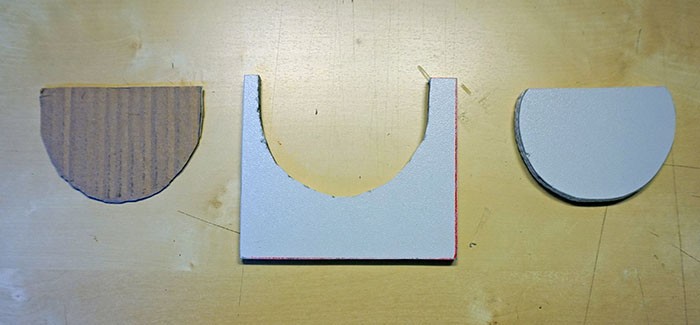
 Jak widać na zdjęciu po lewej brakuje właśnie tej ostatniej grodzi – do niej montujemy silnik, uszczelki popychaczy, wlot wody do zbiorników balastowych itp.
Jak widać na zdjęciu po lewej brakuje właśnie tej ostatniej grodzi – do niej montujemy silnik, uszczelki popychaczy, wlot wody do zbiorników balastowych itp.
Gródź została wycięta z dostarczonego z zestawem kwadratowego kawałka laminatu. Najpierw zrobiłem sobie kartonową kształtkę metodą prób i błędów. Potem chwyciłem za wyrzynarkę i ku uciesze żony zapyliłem pół domostwa. Następnie gródź podziurawiłem wiertarką stołową, powkładałem odpowiednią ilość rurek miedzianych i całość uszczelniłem. Wszystko dopasowane pod układ napędowy widoczny poniżej. Jest to kolejny krytyczny moment, ponieważ gródź trzeba wkleić idealnie prostopadle do „middle deck-a”. Inaczej wał napędowy będzie po kątem.
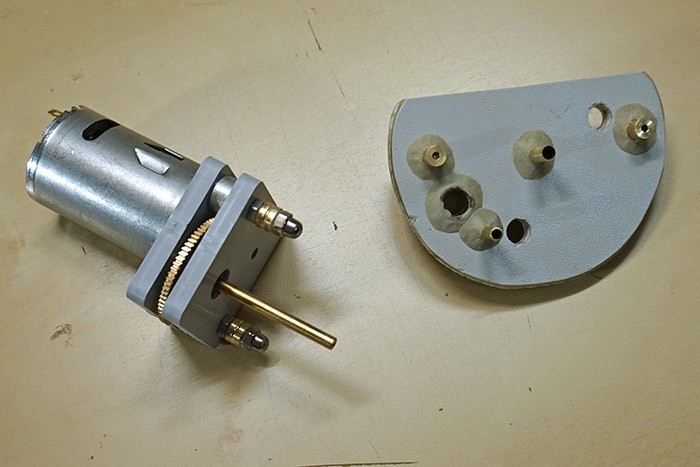
Wklejona ostatnia gródź i silnik. Może jej montaż Poxiliną nie wygląda to ładnie, ale to ma być szczelne na lata. Sprawdziło się też w każdej mojej łajbie i ta masa naprawdę jest warta swojej ceny.
System balastowy T-Max:
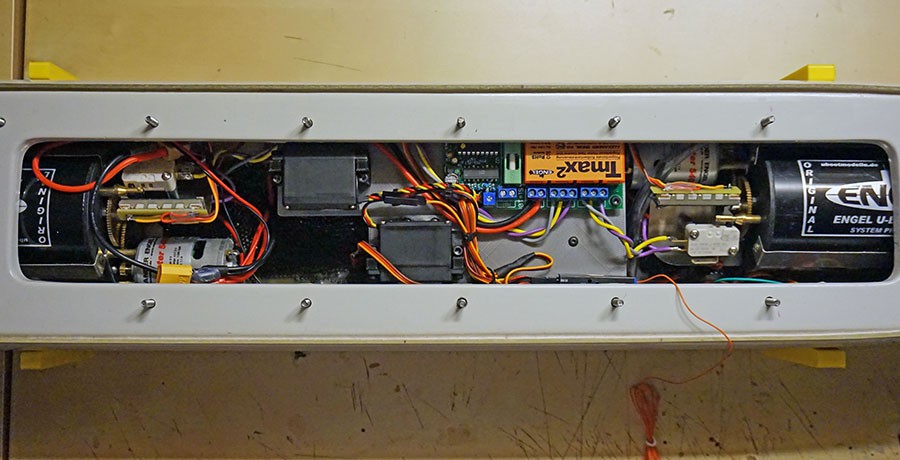
T-max to wersja systemu balastowego od firmy Engel. Jest to wersja najbardziej zaawansowana – z największą ilością funkcji, umożliwiająca niezależną pracę zbiorników balastowych i ich płynny trym z poziomu aparatury. Schemat dość prosty, a w porównaniu do Taesa2 powiedziałbym, że banalny. Osobiście uważam, że same zbiorniki są mechaniczną perfekcją, ale sterownik można dość prosto „skopiować” samemu. Program wydaje się być banalny. Na pewno poradzi sobie byle atmega lub Arduino. Jeśli będę robił projekt od zera lub w oparciu o sam kadłub, na pewno będę kupował tylko zbiorniki.
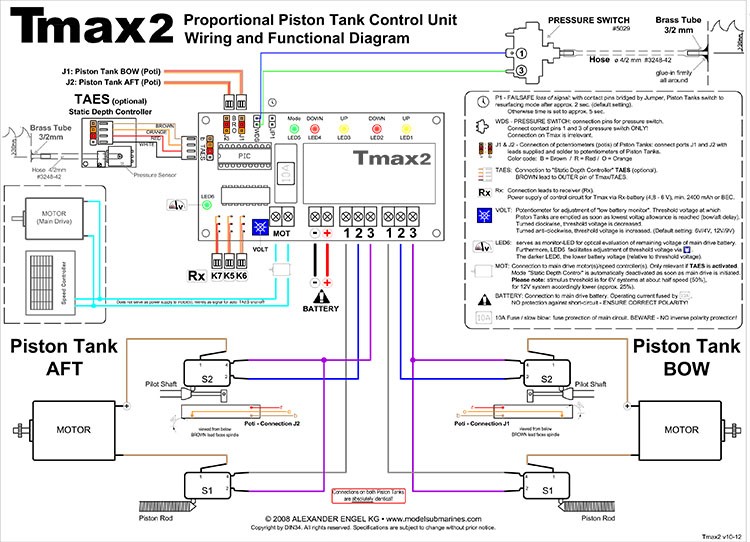
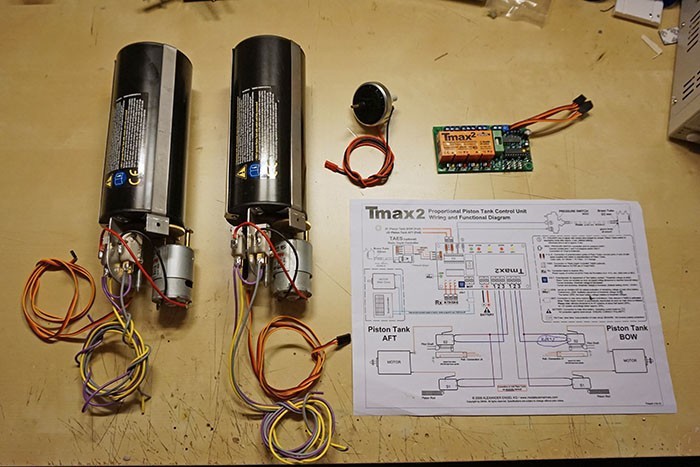 Polutowałem kable do zbiorników balastowych do TMax-a 2., aby to wszystko połączyć ze sobą, zgrać z odbiornikiem i przetestować przed montażem.
Polutowałem kable do zbiorników balastowych do TMax-a 2., aby to wszystko połączyć ze sobą, zgrać z odbiornikiem i przetestować przed montażem.
Film z testu Systemu TMAX II:
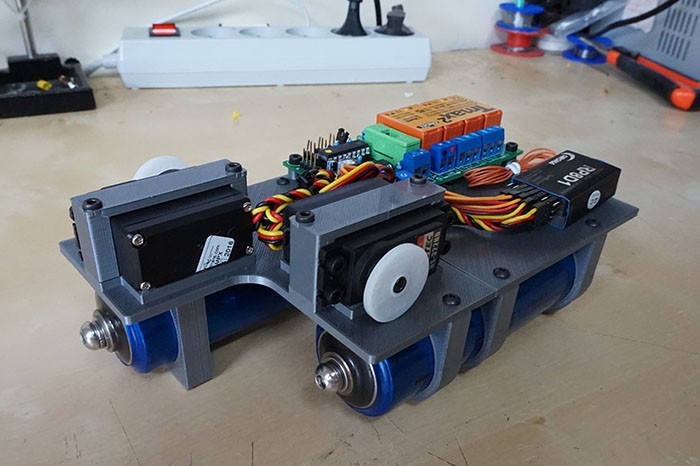
Montaż akumulatorów i elektroniki:
Coraz mocniej do drzwi modelarzy pukają drukarki 3d. Wydruki świetnie sprawdzają się przy elementach konstrukcyjnych lub mechanicznych. Ponieważ Engel, jak wspomniałem wcześniej, nadal tkwi w latach 90tych, model zaprojektował pod pakiet NI-MH… Dobrze, że nie Nicadów :). Postanowiłem to zmienić i zaprojektować własną półkę na elektronikę i mocowanie nowego typu akumulatorów – Li-Fe. Na zdjęciu po lewej, umieściłem także akumulatorek GP wielkości AA dla skali ogniwa Li-Fe.
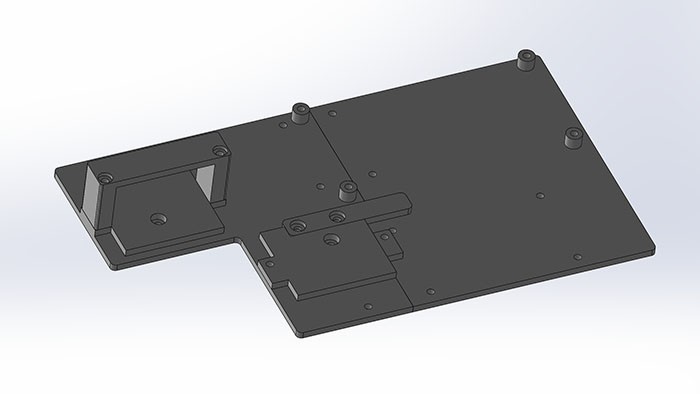

Wydruk nie sprawił problemów i powstało takie coś na serwa, odbiornik, setrownik T-MAX II, oraz na dwa ogniwa Li-Fe 10 000 mAh, dające pakiet napędowy 6.6V 10 000 mAh. Pomiędzy cylindrycznymi akumulatorami jest wystarczająco miejsca na pręty gwintowane zbiorników balastowych oraz jeszcze dodatkowy pakiet 4.8V NiMH – model nie będzie miał BEC-a.
Mechanizm masztów antenowych i peryskopów.
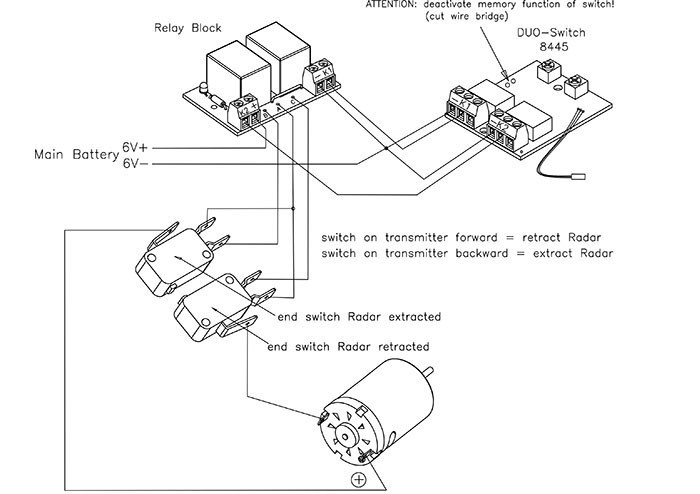 W Typhoonie zrobiłem swój mechanizm oparty na podnośniku nożycowym operowanym przez serwo. Działało to (i nadal działa ) TAK. Tu też trzeba było tak zrobić, ale skoro już mam oryginalny mechanizm to postanowiłem go uruchomić. Jest on mocno przekombinowany. Oczywiście nie można odmówić mu niemieckiej precyzji, jednakże rozwiązanie oparte na pręcie gwintowanym pochodzi z epoki, gdy serwomechanizmy były czymś drogim, a dobre serwomechanizmy czymś rzadkim. Do tego znów potrzebny jest jakiś dodatkowy duoswitch czy inny archaiczny dodatek, bo nie można było wrzucić na płytkę scalaka za 2$, który odczytywałbym PWM i kontrolował przekaźniki. O zastąpieniu przekaźników mosfetami już nawet nie mówię. Schemat tym razem to banał ->
W Typhoonie zrobiłem swój mechanizm oparty na podnośniku nożycowym operowanym przez serwo. Działało to (i nadal działa ) TAK. Tu też trzeba było tak zrobić, ale skoro już mam oryginalny mechanizm to postanowiłem go uruchomić. Jest on mocno przekombinowany. Oczywiście nie można odmówić mu niemieckiej precyzji, jednakże rozwiązanie oparte na pręcie gwintowanym pochodzi z epoki, gdy serwomechanizmy były czymś drogim, a dobre serwomechanizmy czymś rzadkim. Do tego znów potrzebny jest jakiś dodatkowy duoswitch czy inny archaiczny dodatek, bo nie można było wrzucić na płytkę scalaka za 2$, który odczytywałbym PWM i kontrolował przekaźniki. O zastąpieniu przekaźników mosfetami już nawet nie mówię. Schemat tym razem to banał ->
 Problemem okazał się właśnie brak tego duoswitch-a. Udało mi się określić, że on po prostu podaje masę, na konkretny pin przekaźnika pod wpływem sygnału PWM z odbiornika. Planowałem napisać szybki program na Arduino, jednakże okazało się, że żadnej płytki Ardu nie mam w domu. Na szczęście znalazł się stary sterownik do kamery z zoomem, wyposażony w prosty mikrokontroler ATTINY. Ogólnie był to elektroniczny złom. Wylutowałem z niego kilka elementów, napisałem prościutki program i okazało się, że działa
Problemem okazał się właśnie brak tego duoswitch-a. Udało mi się określić, że on po prostu podaje masę, na konkretny pin przekaźnika pod wpływem sygnału PWM z odbiornika. Planowałem napisać szybki program na Arduino, jednakże okazało się, że żadnej płytki Ardu nie mam w domu. Na szczęście znalazł się stary sterownik do kamery z zoomem, wyposażony w prosty mikrokontroler ATTINY. Ogólnie był to elektroniczny złom. Wylutowałem z niego kilka elementów, napisałem prościutki program i okazało się, że działa 
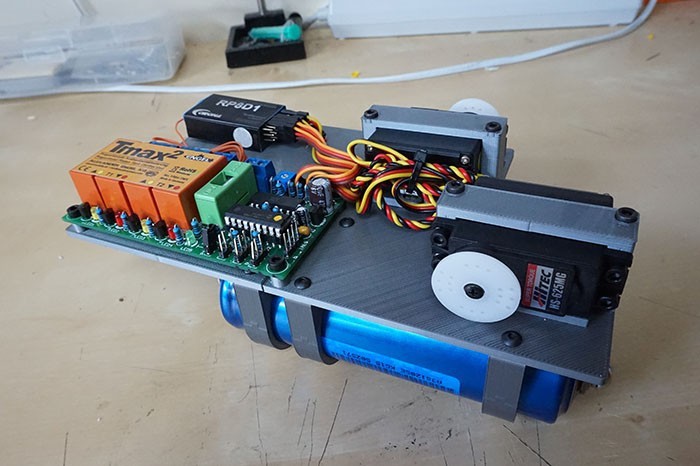
Montaż mechaniki i elektroniki w kadłubie:
 Półka na elektronikę dała włożyć się na styk. Przyklejona niezbyt mocną żywicą w razie potrzeby demontażu. Pomiędzy głównymi akumulatorami znalazło się miejsce na pakiet Ni-MH do zasilania odbiornika, serw i przekaźników. Czemu nie BEC? Otóż i tak będę potrzebował dołożyć jakiegoś ołowiu, więc równie dobrze mogą to być akumulatory wydłużające działanie. Pakiet 2500Ni-MH powinien wystarczyć spokojnie na 3 wyjścia. Mój Typhoon też ma osobny pakiet Ni-MH do zasilania serw i odbiornika, o pojemności 3000mAh i starcza on na jakieś 12 godzin zabawy. Ostatecznym argumentem „za” jest także ograniczenie zakłóceń, które zwykle generują układy impulsowe BEC, lub częste awarie BEC-ów liniowych. Pachnie trochę archaizmem (godnym Engela
Półka na elektronikę dała włożyć się na styk. Przyklejona niezbyt mocną żywicą w razie potrzeby demontażu. Pomiędzy głównymi akumulatorami znalazło się miejsce na pakiet Ni-MH do zasilania odbiornika, serw i przekaźników. Czemu nie BEC? Otóż i tak będę potrzebował dołożyć jakiegoś ołowiu, więc równie dobrze mogą to być akumulatory wydłużające działanie. Pakiet 2500Ni-MH powinien wystarczyć spokojnie na 3 wyjścia. Mój Typhoon też ma osobny pakiet Ni-MH do zasilania serw i odbiornika, o pojemności 3000mAh i starcza on na jakieś 12 godzin zabawy. Ostatecznym argumentem „za” jest także ograniczenie zakłóceń, które zwykle generują układy impulsowe BEC, lub częste awarie BEC-ów liniowych. Pachnie trochę archaizmem (godnym Engela  ), ale pamiętajmy, że okrętami podwodnymi można skutecznie sterować tylko częstotliwościami 40 i 35MHz, które są bardzo czułe na kiepskie zasilanie.
), ale pamiętajmy, że okrętami podwodnymi można skutecznie sterować tylko częstotliwościami 40 i 35MHz, które są bardzo czułe na kiepskie zasilanie.
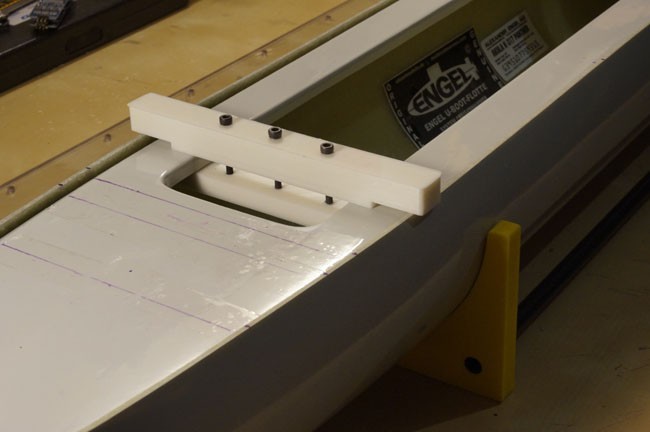
Wcześniej, przy każdej okazji zwracałem uwagę jak bardzo ważne zachowanie jest wszystkich wymiarów w tym drapieżniku. Robiąc miejsce na elektronikę i mechanizmy należy zachować szczególną ostrożność i dokładność. Jeżeli pokład górny wkleimy za nisko (poniżej wymaganych 3mm od krawędzi kadłuba), a dolny pokład za wysoko (czyli, gdyby ta ołowiana „wylewka” przekroczyłaby grubość 8mm), to może się okazać, że nie damy rady zmieści zbiornika balastowego. Jak mały margines błędu zostawił nam Engel pokazują zdjęcia poniżej. Kartka papieru jeszcze wejdzie w tę szparę, paznokieć już nie…
W internecie swego czasu było kilka relacji z budowy tego zestawu, który zakończyły się katastrofą właśnie w tym momencie. Sam dobrze pamiętam, jak pewien Amerykanin musiał wycinać w górnym pokładzie półokrągły tunelik, żeby zmieścić te zbiorniki balastowe. To właśnie temu etapowi budowy zestaw zawdzięcza BARDZO złą reputację (choć chyba niesłuszną), wśród zachodnich modelarzy podwodnych.


Ostatnim momentem kiedy coś mogłoby jeszcze pójść nie tak i się nie zmieścić jest montaż płyty przykrywającej. Tu na szczęście też udało mi się zachować wystarczającą dokładność. Na koniec zamontowałem jeszcze, dwa woltomierze. Jeden obsługuje główny akumulator Li-Fe, drugi Ni-Mh od serw i odbiornika. Po podłączeniu tego głównego od razu było widać, że model będzie miał diabelski potencjał…


Film z pierwszego testu wszystkich systemów:
Detale kadłuba.
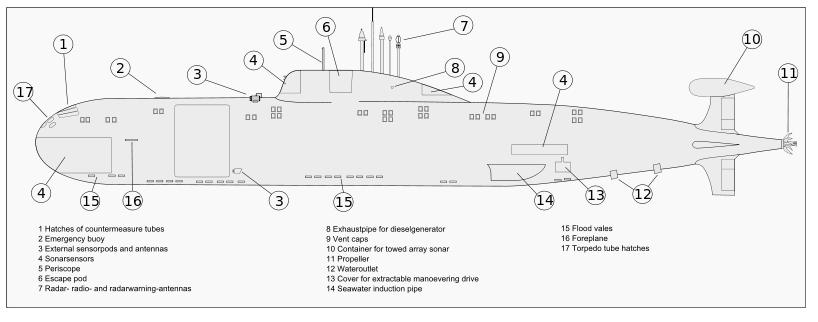
Akula nie posiada wielu szczegółów na swoim kadłubie. To w końcu okręt podwodny. Jednakże, jest kilka detali, które należy dodać. W celu ustalenia szczegółów pomogły na pewno zdjęcia znalezione w sieci plus te dostarczone przez Engela oraz uproszczony schemat Akuli informujący mnie czego jeszcze brakuje. Na dziobowej części pokładu brakowało sensorów umieszczonych z przodu kiosku, oraz polerów (których nadal brakuje na zdjęciu, ale zapewniam, że już są ). Polery w sumie na czas rejsu są chowane, ale bez nich pokład wydaje się po po prostu nudny.


Zdjęcia umożliwiają dość łatwe określenie położenia tych detali. To co jest smutne, to że Engel mimo dostarczenia części z tych zdjęć, nie dostarcza materiałów do stworzenia tych detali. Technika którą stworzyłem swoje, to odlewy żywiczne i druk 3d.
Od strony rufowej brakowało natomiast polerów i „garba”, który nie wiem do czego służy, jest on umiejscowiony nad górnym włazem technicznym.


Na schemacie widać także pokrywy steru strumieniowego. Bardzo się wahałem czy go dodać, na razie został w pudełku.
Detale masztów radiowych i peryskopów.

Na koniec zostają, maszty, anteny i peryskopy. Engel nawet się spisał dostarczając coś takiego:
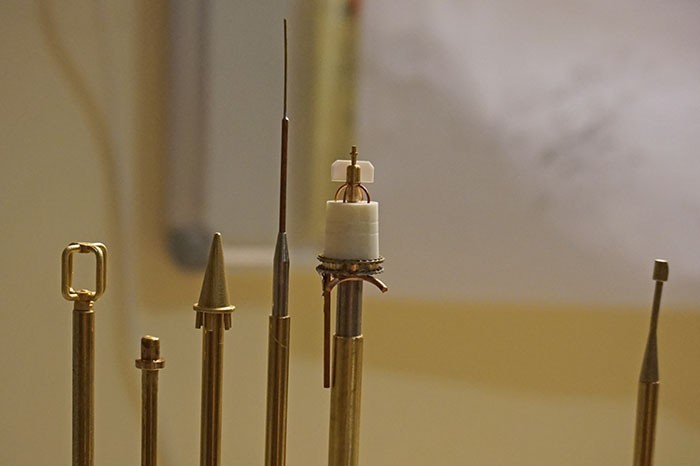 Ja stwierdziłem jednak, że spróbuję swoich sił i stworzę coś od zera, szczególnie, że podpatrzyłem jakiś czas temu u innego modelarza technikę tworzenia takich cudeniek. Stworzyłem atrapy mające więcej detali oraz plus dodam brakującą antenę.
Ja stwierdziłem jednak, że spróbuję swoich sił i stworzę coś od zera, szczególnie, że podpatrzyłem jakiś czas temu u innego modelarza technikę tworzenia takich cudeniek. Stworzyłem atrapy mające więcej detali oraz plus dodam brakującą antenę.
 Zdjęcie detali:
Zdjęcie detali:
Malowanie:

Pierwsze podejście do malowanie Akuli zakończyło się katastrofą. Farba okazała się jakiś koszmarnym „półpołyskiem”, który niemiłosiernie się lał oraz nierówno nakładał. Do tego doszło do jakiejś reakcja z plastikowymi detalami i część z nich zaczęła się rozpuszczać. Absolutna masakra i mówiąc szczerze na moment myślałem, że to koniec możliwości, aby model wyglądał jeszcze kiedykolwiek ładnie…
Modelarstwo jednak uczy spokoju, cierpliwości, a czasem nawet pokory – poczułem się zbyt pewnie przy eksperymentowaniu z farbą.
Jak już zeszły ze mnie negatywne emocje postanowiłem działać. Wszystkie detale (lub ich resztki) zostały więc usunięte, wytworzone na nowo, a farba zeszlifowana praktycznie do laminatu. Ponieważ odechciało mi się eksperymentów z farbami, postanowiłem wrócić do sprawdzonej marki, czyli „Chaos”, jak zawsze bardzo drogiej, ale wartej swojej ceny. Jestem zadowolony z końcowego efektu:


Trymowanie i pływanie.
Dziewiczy rejs odbył się w Bratysławie na zjeździe modelarzy podwodnych – Subregatta 2018 i niestety nie mam zdjęć Akuli z tej imprezy z bardzo prostego powodu. Tuż po trymowaniu model zgubił swoją śrubę i tyle było z pływania nim na zjeździe…
Zdjęcia z pływania poniżej pochodzą z jednego z Warszawskich Parków – Parku Promenada (mylnie zwanego Parkiem Morskie Oko, który jest tuż obok), już nową śrubą. Od siebie dodam, że mniejszą o 10mm, co wyszło modelowi na dobre. z poprzednią – średnicy 65mm model już na 10% przepustnicy pędził dość mocno. Teraz zamontowana została identyczna, ale mniejsza o 10mm i prędkość patrolową mamy na około 25% wychylenia drążka – tak jak powinno być. Polecam tę modyfikację każdemu. Obecnie model jest praktycznie gotowy na sezon 2019.





Niezbędne i zalecane modyfikacje w trakcie budowy:
(Czyli krótki dział, dla tych, którzy także zdecydują się na ten model.)
Lista niezbędnych modyfikacji w trakcie budowy:
-
Zmiana głównego akumulatora napędowego z Ni-Mh D20 na Li-Po lub Li-Fe. Do odbiornika i serw (jako drugi pakiet) może pozostać to co proponują, ale dla napędu to już zbytni archaizm.
-
Całkowita przebudowa dolnego steru kierunku. Musi on być niższy o jakieś 3mm i DŁUŻSZY o 30mm. Bez zmniejszenia wysokości – urwie się bardzo szybko, a bez przedłużenia model jest bardzo niesterowny.
-
System autopoziomowania modelu, potrafię prowadzić bez automatycznego poziomowania wielkie 30kg modele i szybkie modele ważące mniej niż 2kg, ale nie Akulę… Jej się nie da prowadzić bez jakiegoś „pitch controller-a”.
Lista bardzo pożądanych modyfikacji, które bardzo ułatwią obsługę w przyszłości:
-
wymiana stalowej pokrywy WTC „middle decka” na poliwęglan.
-
zmiana średnicy śruby z 65mm na 55mm. W mojej opinii można też użyć nawet 50mm.
Lista bardzo głupich modyfikacji, które często występują w sieci:
-
Montaż steru strumieniowego przed dziobowym zbiornikiem balastowym w sekcji. Dlaczego? Otóż w przypadku jego zapchania lub zatarcia się silnika jego wymiana będzie praktycznie niemożliwa pod wklejeniu „middle decka”. Jeżeli już chcemy montować ster strumieniowy to jedyne słuszne miejsce na niego jest pod wałem napędowym w sekcji rufowej, za grodzią w części już zalanej – należy zastosować metodę uszczelnienia taką jaką wykonałem w Typhoonie.
Ostatnia aktualizacja relacji z budowy: 23.10.2018 r.
Kopiowanie i wykorzystywanie materiałów wyłącznie za zgodą autora strony.