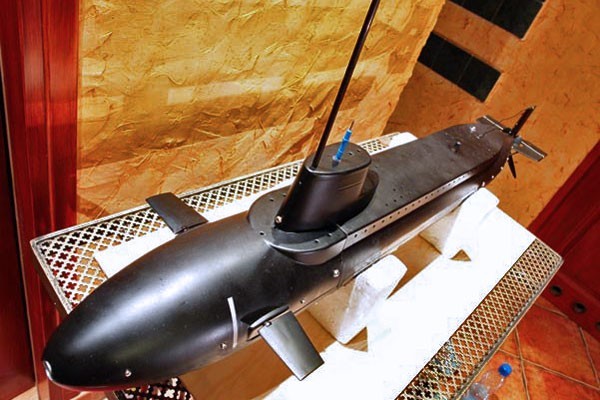
 Seawolf U-1
Seawolf U-1
- Długość: 90cm
- Masa: 4,5 kg
- Skala: Nie dotyczy
- Typ: model statycznie zanurzający się.
Mój pierwszy model nie istniejącej już firmy Robbe – co bardzo widać po jakości wykonania :). Solidnie przebudowany.
Budowa:
Stocznia rozpoczęła budowę pod koniec 2005 roku. Modeł służył w sezonach 2006/2007.
Seawolf U1 jest już obecnie już rozebrany, elektronika i niektóre elementy nadal funkcjonują, ale już w Seawolfie U-2. Model dał mi niezbędne minimum doświadczenia w hobby podwodnym. Według planów jest to prosty model dynamicznego nurka – bez systemu balastowego, sterowany dwoma lub trzema kanałami, gdzie sterowanie odbywa się tylko gazem i sterami na rufie. Oczywiście dla mnie było to rozwiązanie nie do przyjęcia (z perspektywy czasu uważam nawet, że rozwiązanie dwukanałowe jest niewykonalne). Model składałem więc posiłkując się tym co znalazłem w sieci. Modyfikacje wewnętrzne nie wyglądały ładnie, ale działały.
Dodano:
- System balastowy na zasadzie pompy – czyli system statycznego zanurzenia.
- Możliwość sterowania przednimi sterami głębokości.
- Pod koniec swojej służby posiadał także dwa otwierane luki rakietowe, i dwie działające wyrzutnie. Zostały one jednak usunięte ze względów bezpieczeństwa.
Zmodyfikowano:
- całą sekcję suchą – potrzebowałem miejsca na system zanurzenia.
- metodę uszczelnienia i zamykania modelu – ta zaprojektowana od Robbe jest po prostu za delikatna. Pozatym potrzebowałem dostępu do serwa sterującego przednimi sterami.
- sposób włączania elektroniki – niby banał, ale mówimy o całkowicie hermetycznym modelu.
Niestety, wtedy nie prowadziłem fotorelacji z budowy tak jak w przypadku VIIC czy Typhoon’a. Może i lepiej gdyż sekcja sucha charakteryzowała się strasznym bałaganem i ordynarną wręcz metodą obróbki. Byłem dość młody bez dostępu do jakichkolwiek poważnych narzędzi, więc plastik nierzadko musiałem ciąć cążkami do drutu (!) lub roztapiać lutownicą (!) by wprowadzać modyfikacje w WTC. Nie znałem się na klejach, smarach. Miałem tylko ogólną wiedzę na te temat modelarstwa RC.
Model sterowany był 5 kanałami plus 6 szósty na wyrzutnie rakiet (właściwie to fajerwerków) dodaną pod koniec jego „służby”. Mimo iż szczelny i sprawny został rozebrany ze względu na wiele błędów konstrukcyjnych, które prędzej czy później zaczęłyby dawać o sobie znać i mogłoby dojść do sytuacji kryzysowej.
Tak wyglądało pierwsze złożone przez mnie WTC, ale działało… Dziś mi trochę za nie wstydwstyd, ale każdy musiał gdzieś zacząć.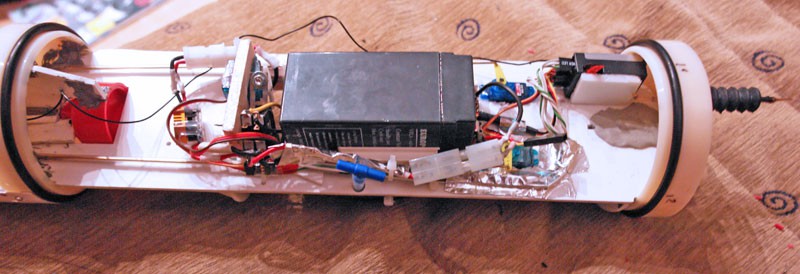
Systemem balastowym była pompa dwukierunkowa z woreczkiem na mocz jako elastycznym zbiornikiem balastowym. Model miał elektroniczny – wbudowany w odbiornik failsafe, który wynurzał model w przypadku utraty sygnału (wielka nowość w tamtych czasach) oraz mechaniczny failsafe oparty na wyższym ciśnieniu w WTC – jeśli doszłoby do awarii pompy część wody ze zbiornika balastowego została by wypchnięta poprzez wyższe ciśnienie w WTC wymuszając chociaż częściowe wynurzenie.
Widok na WTC od dołu. Widoczna pompa po lewej i silnik napędowy po prawej.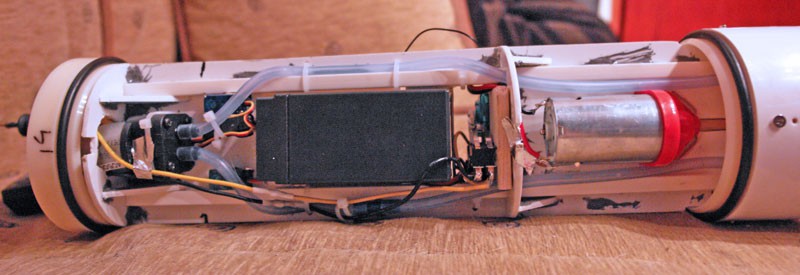
Schemat uwzględniał też mechaniczny zawór bezpieczeństwa uniemożliwiający przepełnienie i rozerwanie zbiornika – po przekroczeniu pewnego ciśnienia w zbiorniku sprężyna w zaworze puszczała i zasysany nadmiar wody przepływał przez pompę w modelu i przez owy zawór nadmiar od razu był usuwany z modelu. Osobnym kanałem sterowano zaworem odcinającym dopływ wody. System musiał być też od czasu do czasu odpowietrzany co było dość upierdliwe. Pompa to dość popularny model wśród modelarzy, jest/była 12 V pompą zębatą używaną miedzy innymi w systemach chłodzenia cieczą. Dostępna też w zagranicznych sklepach modelarskich i hobbistycznych. Seawolf miał 6 Voltowy akumulator żelowy, w pompie wymieniono więc silnik z 12 Voltowego na silnik 6V, jej efektywność wzrosła po tym zabiegu bardzo wyraźnie.
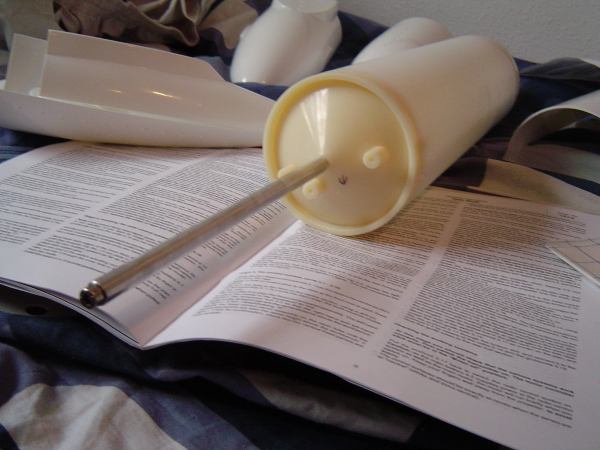
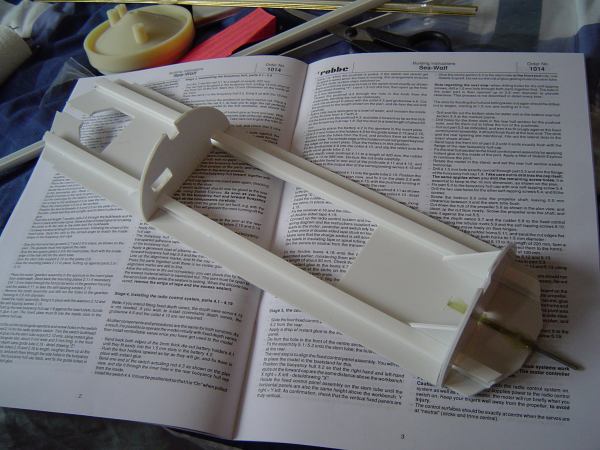
Zdjęcia zawartości pudełka, czyli niezłożonego modelu, dzięki uprzejmości pewnego modelarza z USA. Ja swojego nie obfotografowałem.



Pływanie:
Modelem pływało się bardzo przyjemnie, reagował na stery natychmiastowo. Posiadały one bardzo dużą powierzchnię, gdyż według projektu miał on byś modelem dynamicznie nurkującym. Mimo iz zaprojektowany jako dynamiczny nurek, według mnie nie nadaje się do dużych prędkości – na pełnym gazie robił się niestabilny z tendencją do „dania nura” nawet kiedy stery głębokości były ustawione w pozycji do wynurzenia.

Uczyłem się nim pływać, nieraz otarłem się solidnie o dno, okręt wszystko znosił dzielnie. Przeżył pożar regulatora obrotów. Nigdy nie był zalany i za każdym razem się wynurzał. Został rozebrany, gdyż jako mój pierwszy model miał kilka błędów konstrukcyjnych, które pomału dawały o sobie znać – mechanizmy zużywały się szybciej, dochodziło do zniekształceń spowodowanych nie osiowością budowy. Zestaw sam w sobie jest dość niedokładny, elementy bardzo często nie pasują do siebie. Mimo kilku wad, uważam że jest to bardzo fajny model na początek, jeżeli zamierzamy robić model statycznie zanurzający się. Jeżeli jednak chcemy pobawić się tylko dynamicznym nurkiem to lepszy i tańszy będzie Shark Graupnera (dostępny już tylko z drugiej ręki na ebay-u)

Jak wspomniałem wcześniej nie prowadziłem fotorelacji z budowy, a większość nielicznych zdjęć po prostu zaginęła. Niemniej jednak model wspominam bardzo ciepło i to on napędził cały mój dalszy zapał.