Po trwającej dwa lata, zakończonej sukcesem konwersji VIIC 1:72 Revell-a przyszedł czas na coś większego, by w końcu mieć miejsce na różne dodatkowe systemy. Od jakiegoś czasu miałem też na oku systemy tłokowe Engela – czytałem oraz słuchałem o ich niesamowitych możliwościach od dawna, tylko ta cena…
W maju i czerwcu 2008 pojechałem na spotkania modelarskie do naszych zachodnich sąsiadów i widząc detale owych modeli oraz możliwości systemów zanurzenia stwierdziłem, iż są w 100% warte tych astronomicznych kwot. Stało się, zamówiłem jeden z nich. Mój wybór padł na Typhoon-a z racji skali oraz detali kadłuba.

Wymiary są imponujące:
- skala – 1:100
- długość – 172 cm
- szerokość – 22,8 cm
- wyporność – 21 kg / 22,6 kg
Film z pływania moim modelem w 2016 roku:
Budowa:
Moja stocznia rozpoczęła budowę 29.08.2008.
Zakończyła 10.07.2010
Ostatnia aktualizacja/modernizacja 15.06.2016.
W skład zestawu wchodzi laminatowy pełen detali kadłub oraz odlewany kiosk z żywicy poliuretanowej, sekcja sucha – laminat zbrojony, której otwór będę poszerzał, bo ten oryginalny jest idiotycznie mały, aluminiowa pokrywa, którą zamierzam zamienić na większą i przezroczystą plexę. Sporo szarej plexi do wykonania elementów montażowych wnętrza, przekładniowy zespół napędowy, przepiękne siedmiołopatowe śruby, stery, tunele, mechanizm chowanych sterów oraz mnóstwo rurek, wężyków, przełączników, tulejek itp. Elementów jest po prostu mnóstwo. Schemat montażowy elektroniki przypomina fryzurę Amy Winehouse. Ukoronowaniem są dwa zbiorniki tłokowe 0,825 litra każdy, sterowane układem TAES, ale o samym układzie napiszę później.

Patrząc na ogrom elementów oraz zaopatrzenie warsztatowe jakie trzeba mieć, aby wykonać część pół fabrykantów stwierdzam, że gdybym chciał zrobić okręt tej klasy od podstaw musiałbym wydać kwotę niewiele mniejszą niż za ten zestaw. Nie chodzi tu tylko o narzędzia do których dostępu nie mam – frezarka, lub mam dostęp bardzo rzadko – tokarka, ale głównie o elementy, których nie sprzedaje się na sztuki, czy w małych ilościach i trzeba by było kupować ich niepotrzebnie więcej.

O olbrzymim promieniu skrętu tego modelu krążą legendy, dlatego mój będzie dodatkowo posiadał dwa silniki manewrowe jeden rufowy oraz dziobowy działające dwufunkcyjnie – pomoc przy obracaniu modelu, lub ruch równoległy. Śruby napędowe też będą kontrolowane niezależnie. W planach są ruchome peryskopy, a dużo dalszych kamera, układ sonarowy i być może torpedy. W końcu mam miejsce na to wszystko.
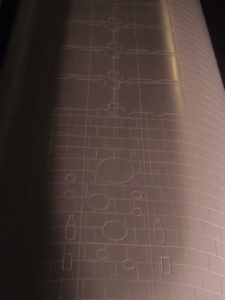
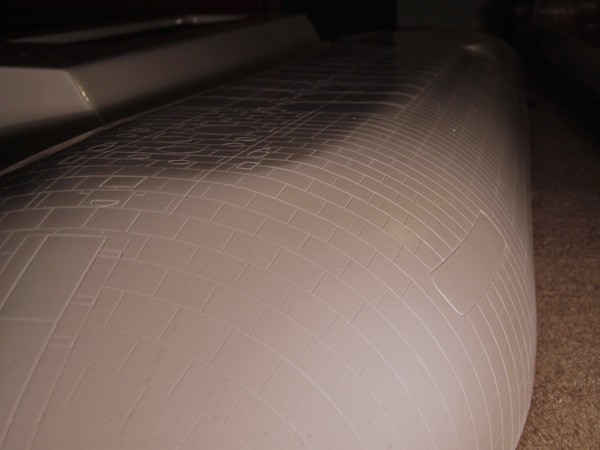
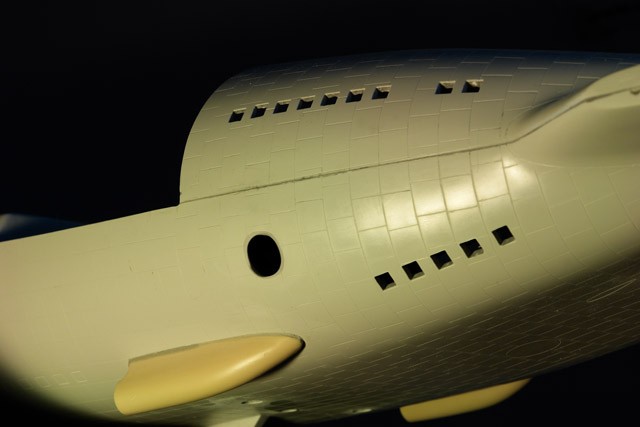
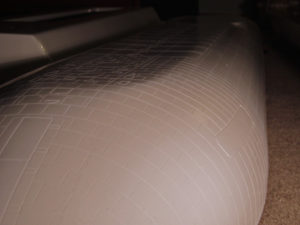 Detale kadłuba oraz kiosku są po prostu powalające. Powalająca jest też ilość otworów jakie muszę wyciąć. Laminat jest bardzo gruby i ciężki, jak nic kilka pilników skończy na nim swój żywot.
Detale kadłuba oraz kiosku są po prostu powalające. Powalająca jest też ilość otworów jakie muszę wyciąć. Laminat jest bardzo gruby i ciężki, jak nic kilka pilników skończy na nim swój żywot.
Wycinanie otworów:
Parę dni pracy, 3 zużyte pilniki, odciski na rękach i niezłe zapylenie domostwa, ale jedna strona otworów przelewowych górnego pokładu gotowa, więc 1/3 roboty już za mną. Strasznie twardy laminat, pierwszy raz mam z takim styczność.

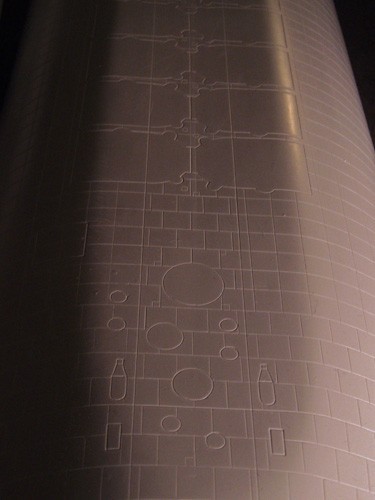
Otwory na wysuwane stery głębokości okazały się dużo trudniejsze niż się spodziewałem, tarcze diamentowe do dremelka okazały się za małe. Musiałem używać zwykłych – tylko takie znalazłem większe, zużywały się jak papier toaletowy po chińskiej kuchni. Wykonałem także odpowietrzniki na dziobie.
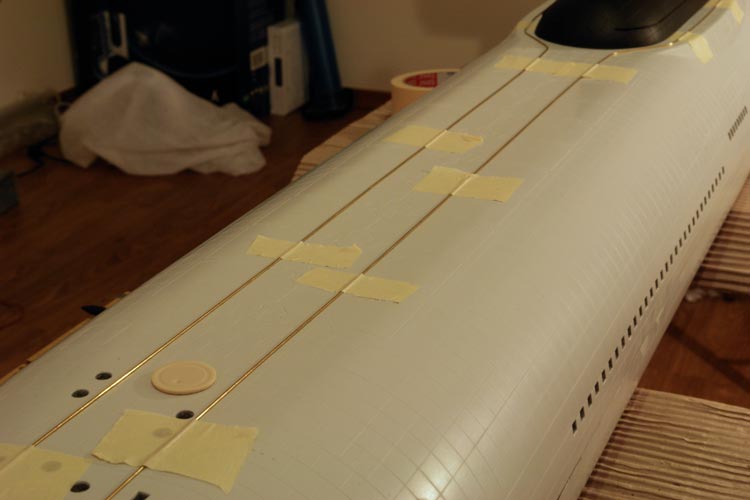
Jak widać na zdjęciu poniżej, otworów przelewowych jest okrutnie dużo. Dodajmy do tego, że z moją tendencją, iż każdy musi być idealnie równy robota okazała się mordercza. Nie chciałem iść na łatwiznę i zostawić je jako okrągłe, więc każdy musiał zostać ręcznie przekonwertowany pilnikiem w kwadrat. Kilka się ukruszyło – zostały naprawione tak, że nie ma śladu. Poxilina jest po prostu cudowna jeżeli chodzi o obróbkę i szybkość z jaką wiąże.

Rufa – tunele i stery:
Gdy zakończyłem nawiercanie, wycinanie oraz wyrównywanie kadłuba, przyszedł czas montaż tylnych sterów. Wbrew pozorom jest tu bardzo dużo elementów, szczególnie takich, których nie widać. Stery nie mogą być także po prostu przyklejone do kadłuba, muszą mieć solidne mocowanie, a przerwy w łączeniach zaszpachlowane, tak samo jak ubytki laminatu. Mosiężny 5 mm pręt nie może się też obracać bezpośrednio w laminacie – musi mieć „łożyskowanie”.


Na zdjęciach łączenia mogą nie wydawać się równe. W dotyku jednak są idealnie gładkie i po nałożeniu farby nic nie powinno być widać. Zdjęcie po prawej pokazuje rufę od środka – ze względu na to, iż górny i dolny ster kierunku nie są nad sobą, a są dość blisko siebie potrzebują dwóch osobnych mocować cięgien. Jedno bardziej z przodu drugie z tyłu. Jeszcze dalej jest natomiast cięgno sterów głębokości. Dostęp jest więc dość utrudniony.
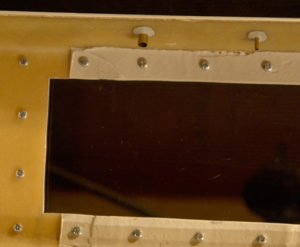
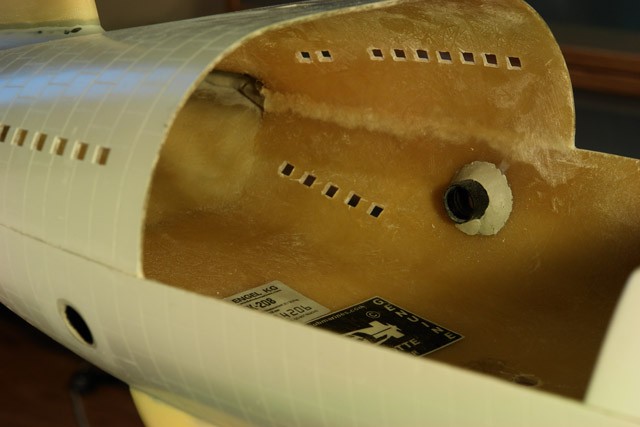
WTC – sekcja sucha:
 Oryginalny otwór WTC wydawał mi się przymały. Na początku jednak wstrzymałem się z jego powiększaniem. Nawierciłem wszystko zgodnie z planem łamiąc przy tym pięć wierteł 4mm – laminat jest zbrojony, a aluminiowa płyta dość gruba… Płyta chodziła dość ciężko, a uszczelka szła by niebezpiecznie blisko wewnętrznej krawędzi, całość nie wzbudzała mojego zaufania. Chwyciłem więc pilarkę kątową i pościnałem śruby.
Oryginalny otwór WTC wydawał mi się przymały. Na początku jednak wstrzymałem się z jego powiększaniem. Nawierciłem wszystko zgodnie z planem łamiąc przy tym pięć wierteł 4mm – laminat jest zbrojony, a aluminiowa płyta dość gruba… Płyta chodziła dość ciężko, a uszczelka szła by niebezpiecznie blisko wewnętrznej krawędzi, całość nie wzbudzała mojego zaufania. Chwyciłem więc pilarkę kątową i pościnałem śruby.
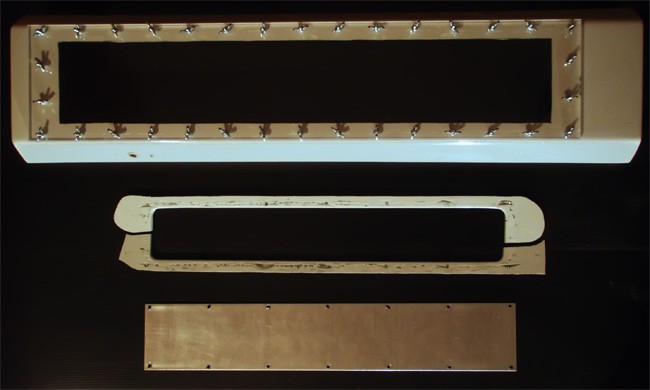
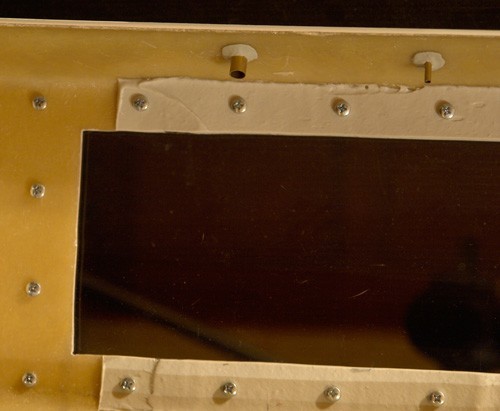
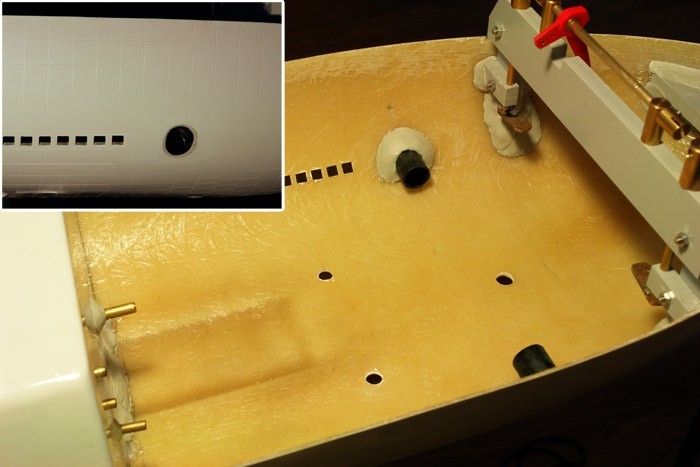
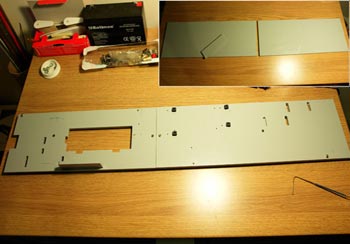
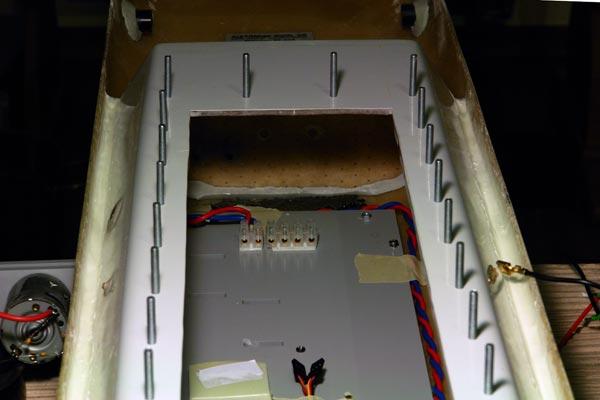
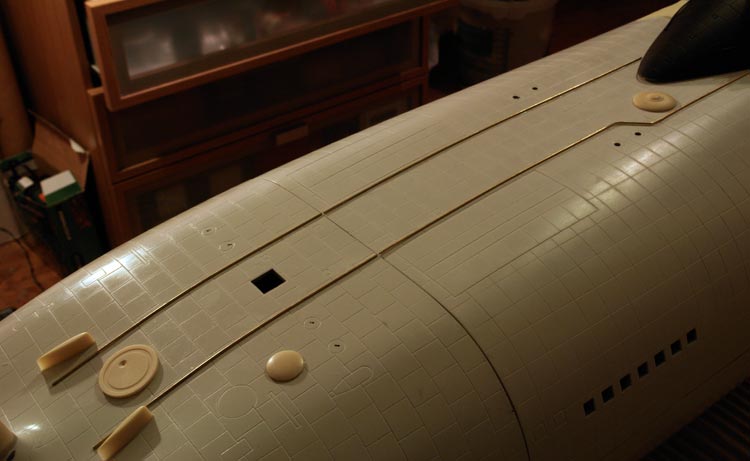
 Następnym krokiem był zakup najtańszej wyrzynarki – 26zł plus najlepszy brzeszczot 29zł – proporcje wydają mi się zabawne. Poszerzyłem otwór o 2cm z każdej strony, oraz o 14cm na długości. To co wyciąłem zostawiłem dla porównania na dole na górnym obrazku. Zaopatrzyłem się także w uszczelkę lepszej jakości (przykleję później) oraz zastąpiłem ten smutny kawał aluminium przezroczystą plexą 10mm. Wywierciłem już także wszystkie otwory mocujące blok napędowy, na popychacze, wały śrub, mechanizm chowania sterów czy silników manewrowych itp, sporo tego z każdej strony.
Następnym krokiem był zakup najtańszej wyrzynarki – 26zł plus najlepszy brzeszczot 29zł – proporcje wydają mi się zabawne. Poszerzyłem otwór o 2cm z każdej strony, oraz o 14cm na długości. To co wyciąłem zostawiłem dla porównania na dole na górnym obrazku. Zaopatrzyłem się także w uszczelkę lepszej jakości (przykleję później) oraz zastąpiłem ten smutny kawał aluminium przezroczystą plexą 10mm. Wywierciłem już także wszystkie otwory mocujące blok napędowy, na popychacze, wały śrub, mechanizm chowania sterów czy silników manewrowych itp, sporo tego z każdej strony.
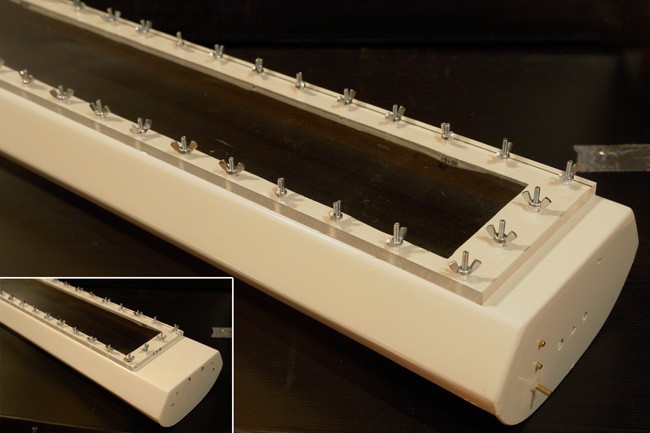
 Widok od spodu głównej części WTC. Każda z 34 śrub musiała zostać przyklejona i uszczelniona, to samo z każdą rurką mosiężną czyli otworem wlotowym – te do zbiorników balastowych oraz do czujników głębokości.
Widok od spodu głównej części WTC. Każda z 34 śrub musiała zostać przyklejona i uszczelniona, to samo z każdą rurką mosiężną czyli otworem wlotowym – te do zbiorników balastowych oraz do czujników głębokości.
Dopasowywanie oraz wklejanie WTC
Sekcja sucha jest jedynym elementem, któremu autentycznie przysłużyła się blisko 2 letnia przerwa w budowie. Dlaczego? Otóż WTC które dostałem było trochę skręcone/wykrzywione, a zmniejszenie jego sztywności poprzez spore powiększenie otworu absolutnie nie pomogło. Pomogło natomiast dopasowanie do WTC osobno kupionej 10mm pleksy, która jest dużo większa i sztywniejsza niż standardowa metalowa płyta. Przykręcona ciasno do sekcji suchej przez 2 lata naprostowała całe WTC ułatwiając bardzo dopasowanie elementu do kadłuba oraz dalsze etapy budowy.
Dopasowanie sekcji suchej. Przednia jej część musiała zostać podniesiona, tylna natomiast ostro potraktowana papierem ściernym. Na dziobie widać też wklejoną już ramkę przednich sterów głębokości, ale o nich napiszę w dalszej części relacji.
 Podczas przyklejania WTC do kadłuba (zalewania szpar żywicą zagęszczoną mikrobalonem) nie było czasu na zdjęcia, trzeba było ją równo rozprowadzić, a następnie ścisnąć połówki kadłuba tak, aby równo do siebie przywierały. Tutaj zrobiłem zdjęcie, podczas jednej z prób „na czas”. Późna zima okazała się idealna do tego zadania, po otwarciu okna i obniżeniu temperatury w warsztacie do do jakiś 8 stopni uzyskałem parę cennych minut. Były mi potrzebne, gdyż z taką ilością żywicy jeszcze nigdy nie pracowałem. Cieniutkie kadłuby szybowców z dzieciństwa to jednak nie to samo…
Podczas przyklejania WTC do kadłuba (zalewania szpar żywicą zagęszczoną mikrobalonem) nie było czasu na zdjęcia, trzeba było ją równo rozprowadzić, a następnie ścisnąć połówki kadłuba tak, aby równo do siebie przywierały. Tutaj zrobiłem zdjęcie, podczas jednej z prób „na czas”. Późna zima okazała się idealna do tego zadania, po otwarciu okna i obniżeniu temperatury w warsztacie do do jakiś 8 stopni uzyskałem parę cennych minut. Były mi potrzebne, gdyż z taką ilością żywicy jeszcze nigdy nie pracowałem. Cieniutkie kadłuby szybowców z dzieciństwa to jednak nie to samo…

Użyłem stanowczo za dużo żywicy, jednakże, wolę jej mieć za dużo niż za mało. Całość jest teraz pieruńsko sztywna i dużo cięższa. Zważywszy, że przede mną jeszcze wklejanie około 5kg ołowiu. Mam już pewność, że okręt na pewno będzie podwodny. Mogę mieć tylko nadzieję, że nie skończy jak model jednego mojego znajomego z z forum ubootwaffe.
Rama chowanych sterów głębokości
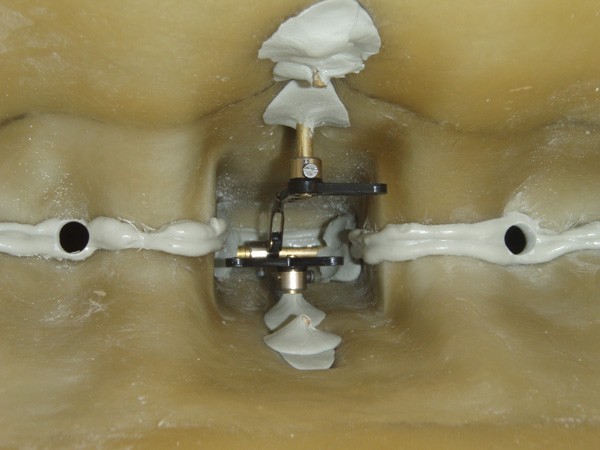
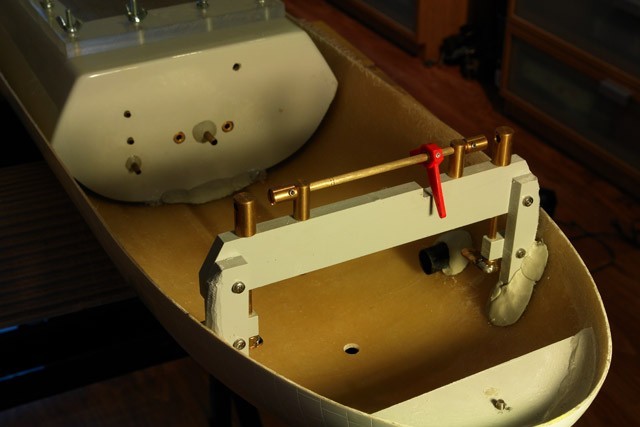
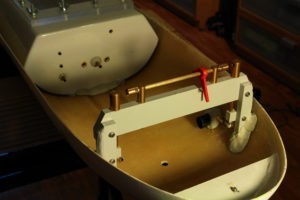 Ramka przednich sterów głębokości jest elementem wymagającym wyjątkowej precyzji z dwóch powodów. Pierwszy jest banalny – otwory które wyciąłem w górnej części kadłuba są bardzo wąskie, jakakolwiek nierówność spowoduje iż stery się nie zmieszczą i bym musiał powiększać szpary, czego bardzo nie chciałem. Drugi jest taki, że jeżeli z jakiegokolwiek powodu, stery zablokują się w pozycji wysuniętej, to aby otworzyć okręt, będę musiał je obciąć. O tym, że krzywe stery miałyby wpływ na same właściwości hydrodynamiczne już nawet nie wspomnę. Do montażu ramy powstało dość skomplikowane narzędzie, pozwalające regulować jej pochylenie w każdą stronę, oraz wysokość z dokładnością do 0.2 mm. Ogólnie bardzo dużo lutowania, przycinania rurek, spiłowywania plexi itp…
Ramka przednich sterów głębokości jest elementem wymagającym wyjątkowej precyzji z dwóch powodów. Pierwszy jest banalny – otwory które wyciąłem w górnej części kadłuba są bardzo wąskie, jakakolwiek nierówność spowoduje iż stery się nie zmieszczą i bym musiał powiększać szpary, czego bardzo nie chciałem. Drugi jest taki, że jeżeli z jakiegokolwiek powodu, stery zablokują się w pozycji wysuniętej, to aby otworzyć okręt, będę musiał je obciąć. O tym, że krzywe stery miałyby wpływ na same właściwości hydrodynamiczne już nawet nie wspomnę. Do montażu ramy powstało dość skomplikowane narzędzie, pozwalające regulować jej pochylenie w każdą stronę, oraz wysokość z dokładnością do 0.2 mm. Ogólnie bardzo dużo lutowania, przycinania rurek, spiłowywania plexi itp…
Mechanizm chowanych sterów głębokości
(część mokra – mechaniczna)
 Mechanizm chowanych sterów głębokości jest tu prawdziwym majstersztykiem, pozwala on całkowicie schować dziobowe stery głębokości na czas poruszania się po powierzchni, oraz eliminuje ryzyko ułamania ich podczas transportu modelu nad zbiornik wodny. Jest on także niezbędny by podnieść (otworzyć) górną połówkę kadłuba, gdyż mocowanie sterów przechodzi właśnie przez nią. Jednocześnie, gdy stery są w pozycji wysuniętej są w pełni proporcjonalnie sterowane. Nie ma jednak róży bez kolców, aby mechanizm działał lekko, bez zbędnych oporów wymagana jest niebotyczna precyzja już przy sklejaniu ramy o której pisałem wcześniej. Sam mechanizm – jego cześć mechaniczna to już po prostu piekło na ziemi, korekty o 1/4 obrotu śruby nie są tu żadnym dziwactwem.
Mechanizm chowanych sterów głębokości jest tu prawdziwym majstersztykiem, pozwala on całkowicie schować dziobowe stery głębokości na czas poruszania się po powierzchni, oraz eliminuje ryzyko ułamania ich podczas transportu modelu nad zbiornik wodny. Jest on także niezbędny by podnieść (otworzyć) górną połówkę kadłuba, gdyż mocowanie sterów przechodzi właśnie przez nią. Jednocześnie, gdy stery są w pozycji wysuniętej są w pełni proporcjonalnie sterowane. Nie ma jednak róży bez kolców, aby mechanizm działał lekko, bez zbędnych oporów wymagana jest niebotyczna precyzja już przy sklejaniu ramy o której pisałem wcześniej. Sam mechanizm – jego cześć mechaniczna to już po prostu piekło na ziemi, korekty o 1/4 obrotu śruby nie są tu żadnym dziwactwem.
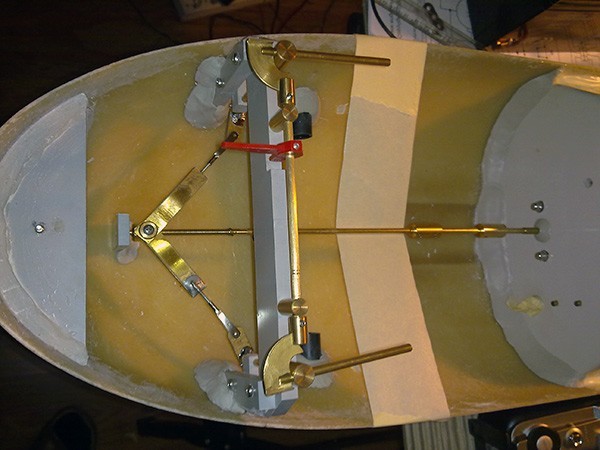
 Chciałem też, aby otwory na stery były możliwie jak najmniejsze, a to wymusiło dodatkowy poziom dokładności. Na dole prezentuje filmik, ukazujący działanie mechanizmu. Serwo, które także jest widoczne w kadrze posłuży do kontroli wychyleń sterów. Na filmie, co jest wytłumaczone w jego adnotacjach, prezentuje też automatyczne wyłączenie zasilania serwa na czas gdy stery są schowane. Analogicznie jest też drugi system – nie pozwala on schować sterów, gdy te, będąc wysunięte nie są w pozycji neutralnej. Część elektroniczna mechanizmu opisana została w dalszej części relacji.
Chciałem też, aby otwory na stery były możliwie jak najmniejsze, a to wymusiło dodatkowy poziom dokładności. Na dole prezentuje filmik, ukazujący działanie mechanizmu. Serwo, które także jest widoczne w kadrze posłuży do kontroli wychyleń sterów. Na filmie, co jest wytłumaczone w jego adnotacjach, prezentuje też automatyczne wyłączenie zasilania serwa na czas gdy stery są schowane. Analogicznie jest też drugi system – nie pozwala on schować sterów, gdy te, będąc wysunięte nie są w pozycji neutralnej. Część elektroniczna mechanizmu opisana została w dalszej części relacji.
Na filmiku serwo, które będzie kontrolowało wychylenia sterów, mimo iż już się porusza nie zostało jeszcze połączone z mosiężnym popychaczem bezpośrednio do dźwigni sterów. Musiałem mieć pewność, że każdy element mechanizmu działa zanim połączyłem jego wszystkie elementy w całość.
Otwory sterów strumieniowych
Model ma blisko 2 metry długości i ponad 22kg wyporności. Stwierdziłem, że niezależna praca śrub napędowych może być niewystarczającą pomocą dla sterów kierunku. Zapadała więc decyzja o montażu sterów strumieniowych. Oryginał ma 4, ja zamontuje 2 – dziobowe i rufowe. Otwory na stery strumieniowe zostały starannie wycięte, wprowadziłem w nie rurki o przekroju 12mm do których poprzez silikonowe wężyki (w celu wytłumienia drgań ) podłączę pędniki, ale o samych pędnikach napiszę później. „Od zewnątrz” wszystko zostało oczywiście zaszpachlowane i wyrównane do idealnej gładkości. Gdy wyjścia już zostaną pokryte farbą nie będą się wyróżniać.
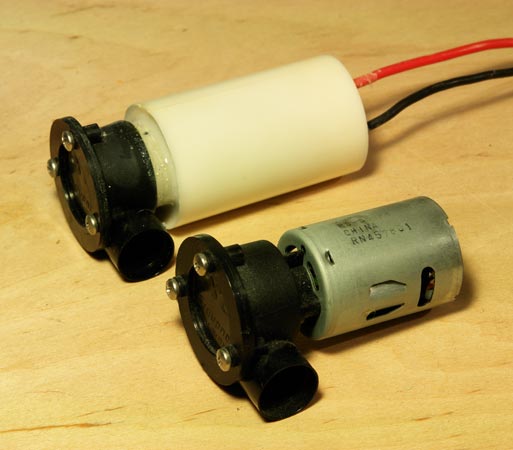
Stery strumieniowe
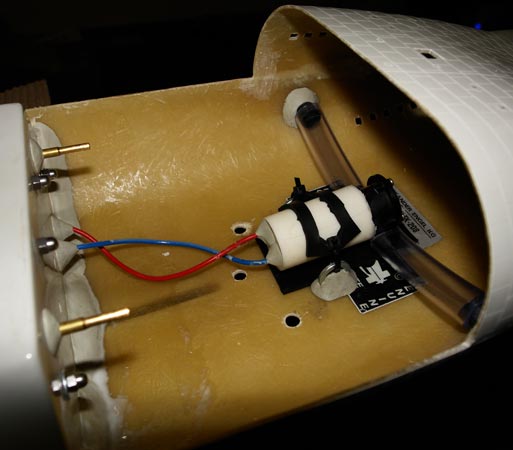
Jest to jednostka firmy Graupner oparta na silniku klasy 400 7,2 V. Specjalnie zaprojektowana jako silnik manewrowy do dużych modeli. W moim Typhoonie będą pracowały dwa takie urządzenia – silnik rufowy i dziobowy. Dwa tryby pracy pozwolą wspomagać skręcanie np: gdy dziobowy ster wyrzuca wodę w prawo, a rufowy w lewo to model skręca w lewo (analogicznie ale odwrotnie przy skręcie w prawo). Właściwie stery pozwolą nawet obracać okrętem w miejscu. Drugi tryb ich pracy posłuży do cumowania – oba stery wyrzucają wodę po jednej stronie kadłuba i model porusza się w bok. Obydwa stery strumieniowe obsługiwane są jednak przez jeden regulator obrotów (15A), zmiana trybu pracy odbywa się przez system dwóch przełączników, obsługiwanych poprzez przełącznik hebelkowy w aparaturze. Przełączniki w modelu zmieniają polaryzację tylko tylnego silnika strumieniowego, przez co model może się obracać, lub płynąc bokiem.
Stery będą się znajdować poza sekcją suchą – oznacza to, że musiałem je uszczelnić, silnik odpowiednio zabezpieczony został całkowicie zalany żywicą dwuskładnikową. Na pierwszym zdjęciu ster „prosto z pudełka”. Na drugim zdjęciu dla porównania : ster juz zabezpieczony oraz drugi, który dopiero czeka na kąpiel w żywicy. Dwa ostatnie zdjęcia to już gotowe, zamontowane w mocowaniach antywibracyjnych jednostki połączone z dyszami kadłuba rurkami pvc.

 |
 |
||
| Tryb „skręcania” – stery strumieniowe pracują w przeciwnych kierunkach | Tryb „cumowania” – stery pracują w tym samym kierunku | ||
| Więcej (i nie tylko) na temat działania oraz używania i miksowania sterów strumieniowych w dziale „Programowanie mixerów w radiu” znajdującym się dalej. | |||
Wnętrze WTC

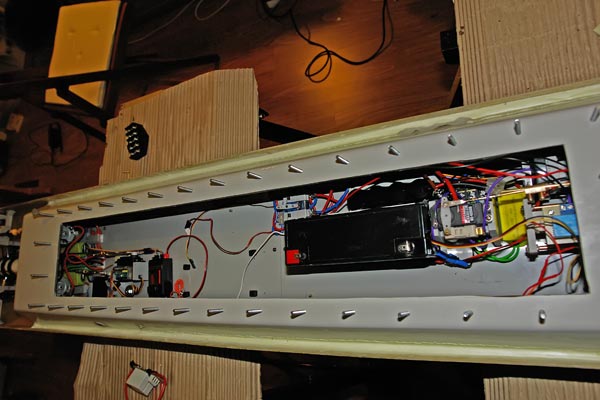
 Prace nad wnętrzem modelu musiałem rozpocząć od odmierzenia odpowiedniej ilości ołowiu, który posłuży jako balast. Następnie balast został, dokładnie rozprowadzony i zalany żywicą, aby już nigdy się nie przemieszczał. Jest tego ponad 4kg – ołowianych kulek, każda o wadze około 3gram. Wszystko podzielono na 3 części. W 4 części (pustej na zdjęciu) zostaną umieszczone akumulatory – żelowy o wadze około 1kg, oraz pakiet odbiornika 250gram i to one pełnią tam funkcję balastu.
Prace nad wnętrzem modelu musiałem rozpocząć od odmierzenia odpowiedniej ilości ołowiu, który posłuży jako balast. Następnie balast został, dokładnie rozprowadzony i zalany żywicą, aby już nigdy się nie przemieszczał. Jest tego ponad 4kg – ołowianych kulek, każda o wadze około 3gram. Wszystko podzielono na 3 części. W 4 części (pustej na zdjęciu) zostaną umieszczone akumulatory – żelowy o wadze około 1kg, oraz pakiet odbiornika 250gram i to one pełnią tam funkcję balastu.


Część elementów, np: mocowanie przedniego serwa dostałem już wycięte. Spowodowało to, że bardzo chciałem, aby płytki, na których wszystko ma się opierać miały równie reprezentacyjny wygląd. 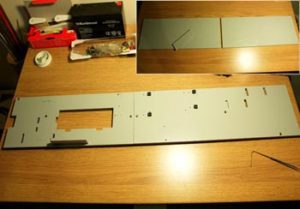 Starannie przesuwając płytę pod wiertarką stołową, wycinałem otwory na pozostałem elementy wyposażenia modelu, później wszystkie krawędzie zostały wygładzone papierem ściernym lub/i poprawione dremelkiem. Nic tak nie psuje modelu jak krzywe elementy montażowe, świadczą one o dokładności modelarza. Część elementów elektronicznych dostało podkładki tłumiące drgania (komputer zbiorników balastowych i odbiornik) przeprojektowałem też, mocowanie samych zbiorników, można je w każdej chwili bezproblemowo wymontować w celu konserwacji.
Starannie przesuwając płytę pod wiertarką stołową, wycinałem otwory na pozostałem elementy wyposażenia modelu, później wszystkie krawędzie zostały wygładzone papierem ściernym lub/i poprawione dremelkiem. Nic tak nie psuje modelu jak krzywe elementy montażowe, świadczą one o dokładności modelarza. Część elementów elektronicznych dostało podkładki tłumiące drgania (komputer zbiorników balastowych i odbiornik) przeprojektowałem też, mocowanie samych zbiorników, można je w każdej chwili bezproblemowo wymontować w celu konserwacji.
Elektronika
TAES – system obsługujący pompy oparty na mikroprocesorze
 Mózgiem modelu jest układ TAES, zaopatrzony w mikroprocesor i cyfrowy czujnik ciśnienienia. Układ TAES kontroluje dwa tłokowe zbiorniki balastowe o łącznej pojemności 1750 ml. Prócz standardowych komend „zalanie zbiorników 100%”, „opróżnienie zbiorników” oraz „zbiorniki 95%” posiada także funkcję automatycznego utrzymywania głębokości. Działa to tak, że zanurzamy okręt na wybraną głębokość, czujnik zapamiętuje położenie/ciśnienie i sam zaczyna sterować zbiornikami w ten sposób by model utrzymał głębokość z dokładnością do 10cm. Dodatkowo system wyposażony został w presostat, który po wykryciu głębokości 1,8 lub większej automatycznie zaczyna opróżniać zbiorniki – jest to zabezpieczenie przed zbytnim zanurzeniem.
Mózgiem modelu jest układ TAES, zaopatrzony w mikroprocesor i cyfrowy czujnik ciśnienienia. Układ TAES kontroluje dwa tłokowe zbiorniki balastowe o łącznej pojemności 1750 ml. Prócz standardowych komend „zalanie zbiorników 100%”, „opróżnienie zbiorników” oraz „zbiorniki 95%” posiada także funkcję automatycznego utrzymywania głębokości. Działa to tak, że zanurzamy okręt na wybraną głębokość, czujnik zapamiętuje położenie/ciśnienie i sam zaczyna sterować zbiornikami w ten sposób by model utrzymał głębokość z dokładnością do 10cm. Dodatkowo system wyposażony został w presostat, który po wykryciu głębokości 1,8 lub większej automatycznie zaczyna opróżniać zbiorniki – jest to zabezpieczenie przed zbytnim zanurzeniem.
Główny układ napędowy – dwie niezależnie sterowane śruby.
 Dwie 60mm siedmiołopatowe śruby wprawiane są w ruch poprzez dwa silniki elektryczne klasy 600, każdy z niezależną przekładnią 1:40. Regulacja obrotów odbywa się poprzez dwa osobne regulatory 15A. Sterowanie z poziomu radia może odbywać się poprzez jeden wspólny drążek, można także wyłączyć dowolny silnik (np: udając awarie) lub włączyć tryb półautomatyczny – kąt wychylenia steru ma wtedy proporcjonalny wpływ na spadek ilości obrotów na jednym silniku i wzrost obrotów na przeciwnym, by zmniejszyć promień skrętu.
Dwie 60mm siedmiołopatowe śruby wprawiane są w ruch poprzez dwa silniki elektryczne klasy 600, każdy z niezależną przekładnią 1:40. Regulacja obrotów odbywa się poprzez dwa osobne regulatory 15A. Sterowanie z poziomu radia może odbywać się poprzez jeden wspólny drążek, można także wyłączyć dowolny silnik (np: udając awarie) lub włączyć tryb półautomatyczny – kąt wychylenia steru ma wtedy proporcjonalny wpływ na spadek ilości obrotów na jednym silniku i wzrost obrotów na przeciwnym, by zmniejszyć promień skrętu.
Dodatkowo każdy silnik ma nieliniową regulację obrotów, gdyż nie możliwe jest znalezienie dwóch identycznie działających silników, zawsze jeden będzie kręcił się szybciej, a drugi wolniej. Dysproporcja powiększa się, gdy silniki kręcą się w różne strony. Nieliniowa korekta powoduje, że nie muszę kompensować różnic trymem głównego steru.
Napęd mechanizmu chowanych sterów głębokości.
 Przednie stery głębokości to dość złożona konstrukcja. Elementy będące w sekcji mokrej zostały już opisane przeze mnie wcześniej. Została jeszcze elektronika, która jest bezpiecznie schowana w sekcji suchej. Umożliwia ona chowanie i wysuwanie sterów, oraz gdy są wysunięte – powoduje ich wychylenia. Dodatkowo skonstruowałem elektroniczne zabezpieczenie uniemożliwiające schowanie sterów, gdy te są w innej pozycji niż neutralna oraz odłączające zasilanie serwa wychyleń, gdy stery są złożone.
Przednie stery głębokości to dość złożona konstrukcja. Elementy będące w sekcji mokrej zostały już opisane przeze mnie wcześniej. Została jeszcze elektronika, która jest bezpiecznie schowana w sekcji suchej. Umożliwia ona chowanie i wysuwanie sterów, oraz gdy są wysunięte – powoduje ich wychylenia. Dodatkowo skonstruowałem elektroniczne zabezpieczenie uniemożliwiające schowanie sterów, gdy te są w innej pozycji niż neutralna oraz odłączające zasilanie serwa wychyleń, gdy stery są złożone.

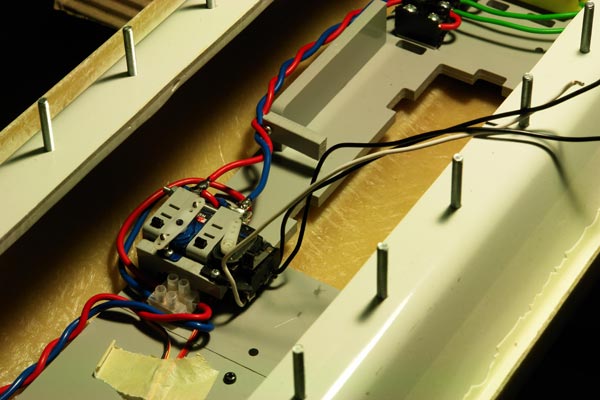
„Zmiennik polaryzacji” tylnego steru strumieniowego.
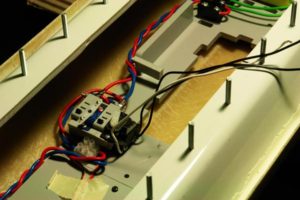 Bardzo chciałem, aby model posiadał dwa tryby pracy sterów strumieniowych. Co dokładnie mam na myśli jest wyjaśnione wcześniej. W skrócie jednak, aby model raz był obracany przez stery, a innym razem pchany bokiem, musiałem tak zaplanować sterowanie, aby polaryzacja jednego z silników sterów mogła zostać odwrócona – w tym wypadku tylnego steru strumieniowego. Powstał więc „zmiennik polaryzacji” tylnego steru strumieniowego. Mikroserwo, obsługujące dwa mikro przełączniki 16A, które w zależności od pozycji zmieniają kierunek prądu wysyłanego TYLKO do tylnego steru. Rozwiązanie to ma same plusy – wystarczy jeden regulator obrotów do dwóch sterów oraz tylko jeden kanał proporcjonalny, drugi kanał to tylko przełącznik. Dodatkowo nie musiałem programować dodatkowego miksera w radiu, co dało mi możliwość dodatkowej automatyki opisanej w części: „Programowanie Mikserów w Radiu”.
Bardzo chciałem, aby model posiadał dwa tryby pracy sterów strumieniowych. Co dokładnie mam na myśli jest wyjaśnione wcześniej. W skrócie jednak, aby model raz był obracany przez stery, a innym razem pchany bokiem, musiałem tak zaplanować sterowanie, aby polaryzacja jednego z silników sterów mogła zostać odwrócona – w tym wypadku tylnego steru strumieniowego. Powstał więc „zmiennik polaryzacji” tylnego steru strumieniowego. Mikroserwo, obsługujące dwa mikro przełączniki 16A, które w zależności od pozycji zmieniają kierunek prądu wysyłanego TYLKO do tylnego steru. Rozwiązanie to ma same plusy – wystarczy jeden regulator obrotów do dwóch sterów oraz tylko jeden kanał proporcjonalny, drugi kanał to tylko przełącznik. Dodatkowo nie musiałem programować dodatkowego miksera w radiu, co dało mi możliwość dodatkowej automatyki opisanej w części: „Programowanie Mikserów w Radiu”.
Włącznik magnetyczny
 Modele okrętów podwodnych mają dość zawiłe konstrukcje – szczególnie widać to po tym Tajfunie. Cała elektronika musi być w końcu doskonale chroniona przed wodą w sekcjach suchych do których dostęp jest dość utrudniony – w przypadku Typhonna dostępu do elektroniki „bronią” aż 34 śruby, które za każdym razem, gdy model trzeba by było włączyć lub wyłączyć musiałyby zostać odkręcone. No chyba że mamy owy włącznik magnetyczny.
Modele okrętów podwodnych mają dość zawiłe konstrukcje – szczególnie widać to po tym Tajfunie. Cała elektronika musi być w końcu doskonale chroniona przed wodą w sekcjach suchych do których dostęp jest dość utrudniony – w przypadku Typhonna dostępu do elektroniki „bronią” aż 34 śruby, które za każdym razem, gdy model trzeba by było włączyć lub wyłączyć musiałyby zostać odkręcone. No chyba że mamy owy włącznik magnetyczny.
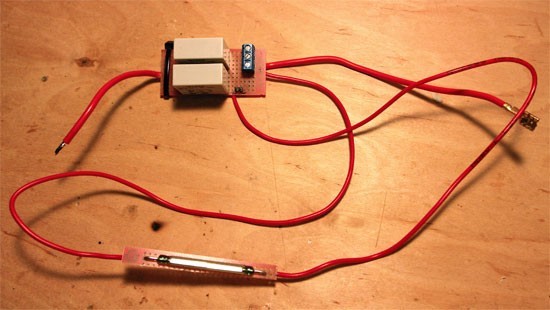
Urządzenia tego typu są dostępne u naszych zachodnich sąsiadów czy też w USA, jednakże mają dwie wady. Pierwszą jest cena, a druga jest taka, że nie ma urządzeń, które obsługiwałaby dwa osobne obwody jednocześnie – jeżeli tak jak w moim modelu ma się dwa obwody o różnych napięciach (4.8V i 6V) do różnych celów, trzeba kupić dwa.
Dlatego skonstruowałem własne urządzenie elektroniczne, które pozwala włączyć/wyłączyć obydwa obwody elektryczne modelu poprzez przyłożenie magnesu do miejsca w kadłubie bez odkręcania jakichkolwiek śrub. Nazwałem je jakże oryginalnie „włącznikiem magnetycznym”. Maksymalny prąd załączania wynosi 5A dla obwodu serw (4.8V) i 32A dla obwodu silników napędowych, sterów strumieniowych oraz pomp balastowych (6V). Nie muszę mówić, że wyszło dużo taniej.
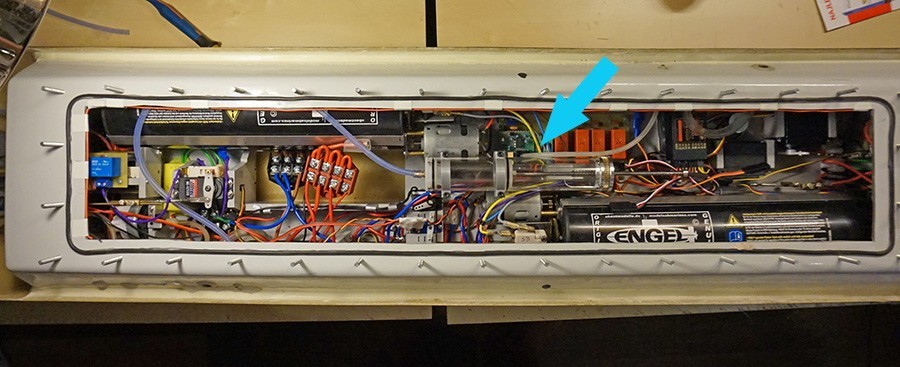
Rozmieszczenie elektroniki i prowadzenie przewodów
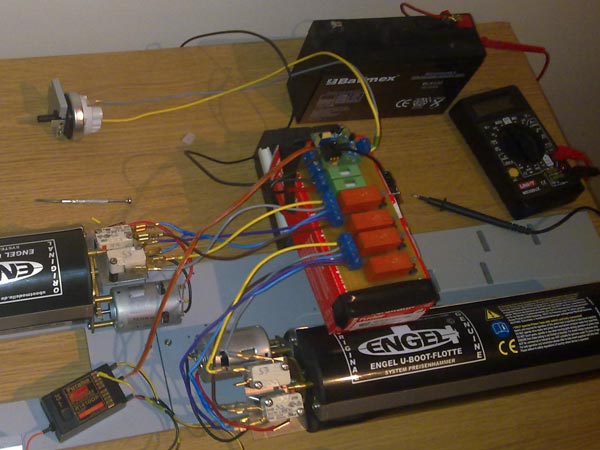
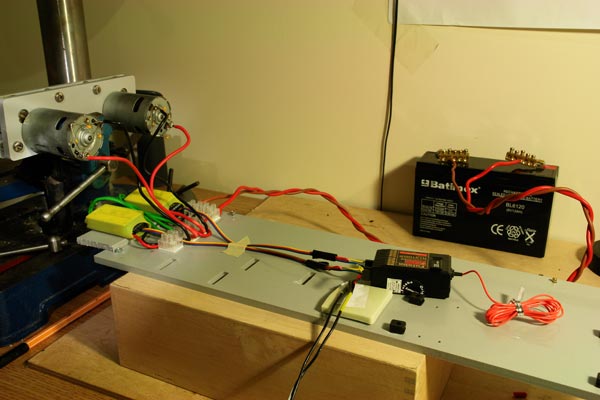
Niby banał, a jednak bardzo ważna rzecz, mająca wpływ na całe przyszłe zachowanie modelu – między innymi na to jak dużym zasięgiem będziemy dysponować, czy będziemy mieć drgania serw przy załączaniu pomp lub wysokich obrotach silników oraz na to czy silniki dostaną dostatecznie dużo amperów, gdy jednocześnie będą włączone stery strumieniowe i pompy. Bardzo długo wszystko planowałem, nad wszystkim zastanowiłem się dwa razy. Elektroniki i kabli miało w końcu wejść tu dość sporo. Model posiada trzy regulatory obrotów, czujnik przechyłu, TAES, presostat, spowalniacz ruchu serwa, szereg przekaźników i switchy, dwie pompy Engels-a, dwa stery strumieniowe, sześć serwomechanizmów, akumulator żelowy 6V 12Ah, pakiet odbiornika 4,8V 3,3Ah, no i sam odbiornik – 10 kanałową futabe R1410DP. Tradycyjnym założeniem była, łatwa i szybka wymiana każdego elementu w razie potrzeby.
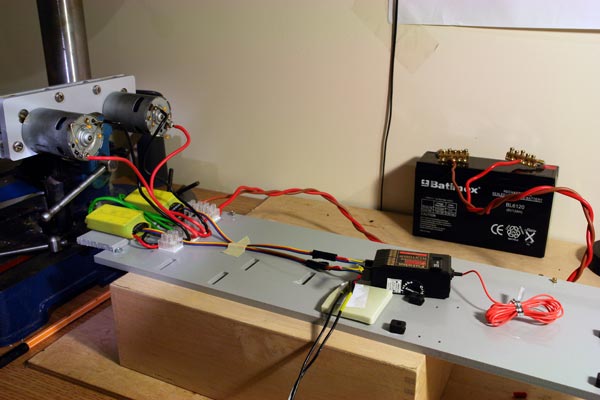
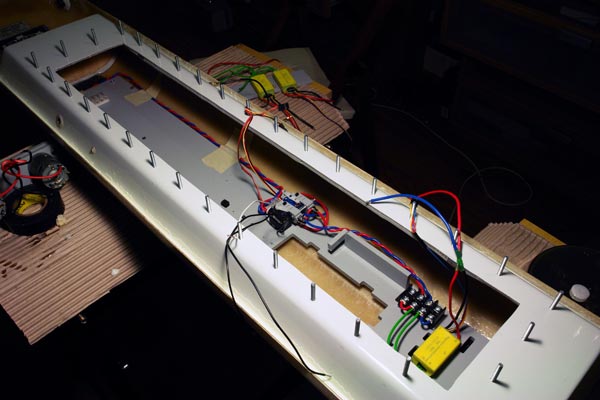
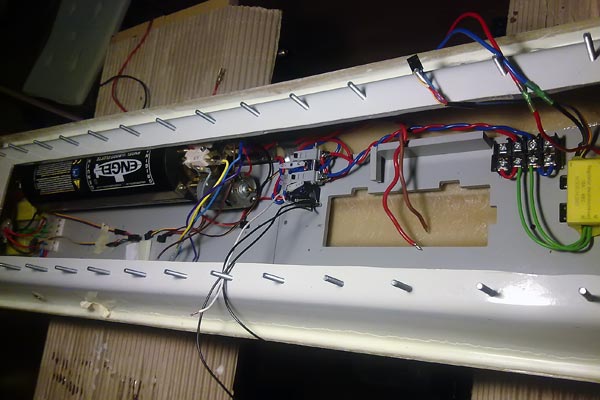
Na drugim i trzecim zdjęciu od prawej (rząd górny) widać główną magistralę zasilającą dwa silniki klasy 600, są to dwa przewody 2,5mm. Od początku wiedziałem, że będzie to główne źródło zakłóceń, więc kable zostały dokładnie skręcone, co mocno ograniczy szumienie. Dodatkowo każdy silnik został zaopatrzony w trzy kondensatory. Następnie już kablami 1,5mm zostało poprowadzone zasilanie do tylnego steru strumieniowego. Te kable także zostały skręcone i położone z tej samej strony co poprzednie. Plan był taki, że wszelkie przewody, także te od serwomechanizmów kładę po jednej stronie, jak najniżej. Po drugiej stronie, jak najwyżej natomiast, zamocowałem antenę odbiornika. Do modelu weszło mi prawie 8 metrów (!) różnego rodzaju przewodów, nie licząc tych od serw. Myślę, że plan odseparowania anteny i samego odbiornika od reszty się powiódł, gdyż przy teście zasięgu zostałem pozytywnie zaskoczony.


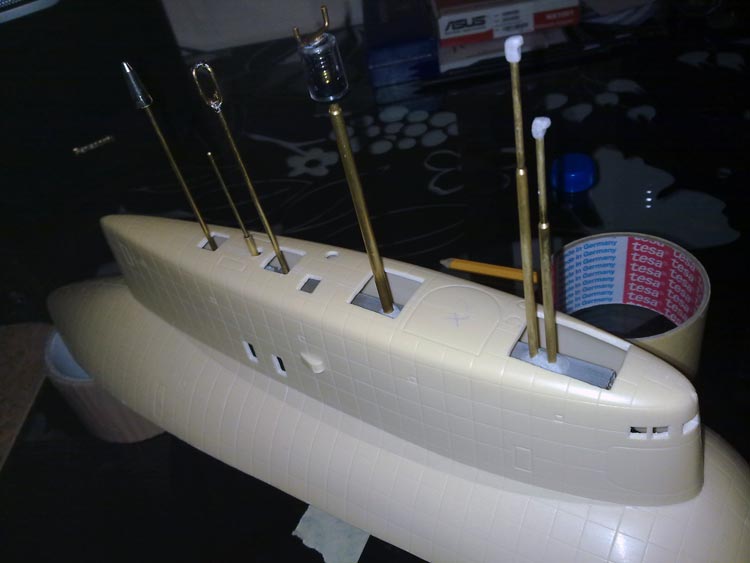
Kiosk oraz mechanizm peryskopów i anten
Od początku chciałem mieć wysuwane peryskopy i anteny z kiosku. Oczywiście można znaleźć gotowe rozwiązania w internecie, lub zamówić gotowy mechanizm w wersji do złożenia. Wszystkie dostępne rozwiązania mają jednak dwie bardzo duże, jak dla mnie, wady. Pierwszą jest komplikacja konstrukcji i potrzeba skonstruowania odpowiedniej instalacji elektroniczno-elektrycznej. Druga taka, że owe zaoferowane przez innych peryskopy i anteny są bardzo krótkie! Konstruktorzy bronią się „skalowaniem do oryginału” ale prawda jest taka, że ich mechanizmy (siłowniki prostoliniowe oparte na pręcie gwintowanym) potrzebują bardzo dużo miejsca w pionie, co uniemożliwia wykorzystanie całej wysokości kiosku na same peryskopy oraz muszą jeszcze doliczyć miejsce na sam napęd mechanizmu, który zajmuje jeszcze więcej miejsca w WTC oraz ze względu, że umieszczony jest dość wysoko, zakłóca środek ciężkości. Nie mówiąc o zakłóceniach od dodatkowych przekaźników i okablowania. Dlatego zaprojektowałem i wykonałem własny mechanizm.
Mój oparty jest na konstrukcji podnośnika nożycowego. Jako napęd mechanizmu zastosowałem tak zwane „silne” serwo. Problem dodatkowej elektroniki i zasilania od razu zniknął – poprostu wpinam wtyk serwa do odbiornika. Dodatkowo, główną cechą podnośnika nożycowego jest to, że złożony jest niemal płaski, więc mogłem wykorzystać całą wysokość kiosku na anteny i peryskopy. Jakie są plusy ciut dłuższych anten i peryskopów? Otóż w czasie „patrolu” łatwiej utrzymać głębokość peryskopową, gdyż przy dłuższych peryskopach mamy trochę więcej czasu zanim znikną pod wodą, jeśli model nam się trochę zanurza, lub zanim mignie nam górną częścią kiosku, jeśli model zaczął nam iść lekko w górę. Odrobina więcej czasu na reakcję przy tej skali modelu i jego niesamowitej inercji jest bezcenna. Ostatnim plusem mojego projektu jest pełna dowolność wysokości wysunięcia peryskopów. Jeśli chce zachować skalę, wysuwam je tylko w 70% – regulacja odbywa się pokrętłem w apraturze. Efekt wolnego opuszczania i wysuwania może natomiast zostać osiągnięty na dwa sposoby. Poprzez odpowiednią funkcję w radiu, jeśli jest dostępna lub poprzez „slow servo” – dodatkowe urządzenie wpinane między serwomechanizm, a odbiornik.
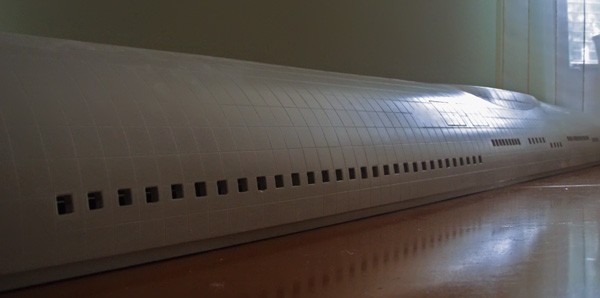
Detale kadłuba i malowanie
Ten model to nie tylko efektowna skala, to także wspaniały kadłub, odwzorowanie poszycia po prostu powala. Nie mniej jednak, aby efekt nie był rewelacyjny, a powalający, kadłub wymagał dodania jeszcze kilku detali, oraz nałożenia odpowiedniej farby, markerów i zeszlifowania łączeń. Zdjęcia po krótcy opisują cały proces po kolei plus peryskopy i anteny własnej roboty. Farba jakiej użyłem to „Chaos black” – farba podkładowa do figurek z Warhamera. Jest rewelacyjna i bezkonkurencyjna jeśli chodzi i drobnoziarnistość.





Programowanie mikserów w radiu
Miksery – opcja w aparaturze. Bardzo cenna szczególnie dla modelarzy lotniczych, ale szkutnicy też powinni się do nich przekonać. Pozwala ona, jak sama nazwa wskazuje, miksować kanały. W ten sposób jednym drążkiem można sterować np. dwoma silnikami, a po przestawieniu przełącznika (w tym wypadku trójpozycyjnego), wyłączyć jeden z nich. Po przestawieniu innego przełącznika można „kazać” jednemu silnikowi zwalniać podczas zakrętu, a drugiemu nabierać obrotów – silniki będą wtedy reagować nie tylko na wychylenia drążka gazu, ale także na wychylenia drążka steru – główny napęd wspomoże wtedy zwrot. Pojęcie mikserów może wydać się dość trudne, dlatego zachęcam do obejrzenia filmiku informującego na czym to dokładnie polega i jak zostało zastosowane w moim modelu. Typhoon używa obecnie 7 mikserów. Już widzę, że pływanie bez paru z nich byłoby bardzo utrudnione i przynosiło dużo mniej radości. Niestety to wada tej skali.
Dodatkowo jak w każdym modelu wielosilnikowym, występują różnice w prędkości obrotowej silników i to dość spore… Na razie skalibrowałem to z poziomu aparatury – tzw. krzywe (bezcenna rzecz) pozwalają na niesymetryczne wysyłanie sygnału do silników, jak jeden dostaje sygnał „do przodu 40%” to drugi – ten, który kręci się wolniej, dostanie w tym samym momencie sygnał „do przodu 48%” w ten sposób, bez trymowania sterem można wyregulować okręt. W przyszłości zastanowię się nad tak zwanym „governorem” – urządzeniem stworzonym specjalnie do modeli wielosilnikowych wyrównującym ich prace.
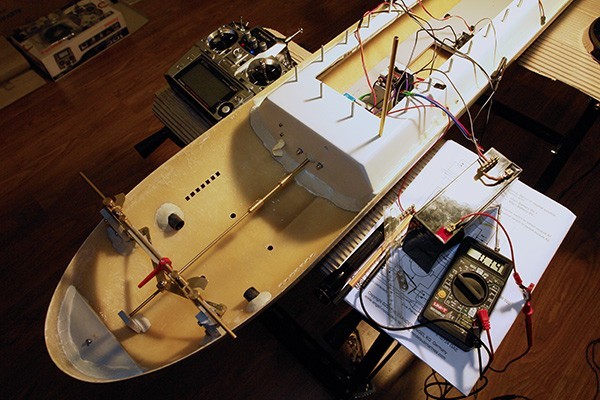
Trymowanie i testy „na mokro”


Testy hermetyczności zajęły w sumie tydzień, były dwie nieszczelności, dokładnie tam gdzie się spodziewałem, że będą. Korekta nie trwała długo. Potem przyszedł czas na trymowanie, które jak zwykle w moim przypadku okazało się gehenną, ze względu, iż nie znoszę, gdy model ma nieprawidłową linię wodną. Właściwie to należy zauważyć, że każdy tajfun ma nieprawidłową linię wodną. Płynąc po powierzchni, okręt jest trymowany z lekkim przechyłem na rufę, gdyż w przeciwnym wypadku śruby łapią powietrze, co powoduje wielki spadek ich efektywności.
Rozmiar modelu uniemożliwia jego wytrymowanie w domowej wannie. Dla Typhoona skręciłem więc drewnianą skrzynię, którą wyłożyłem najgrubszą możliwą podłogową folią malarską. Folia nie przeciekała przez około 2-3 dni, później pod skrzynią zaczęła pojawiać się niewielka kałuża. Sam trym zajął mi bardzo dużo czasu. Cyfrowy czujnik głębokości wymaga bardzo dużej precyzji przy wyważaniu. By działał jak należy okręt trzeba wytrymować z dokładnością do 5 gram! Nie mniej udało mi się ustanowić wstępny trym, dalsze korekty będą już nad prawdziwą wodą.
Pływanie:




Pierwsze pływanie wykazało kilka błędów, których zresztą się spodziewałem – nie wszystko da się ustawić w warunkach „laboratoryjnych”. Do bani okazał się trym, nadal musiałem dołożyć i poprzekładać ołowiany balast, gdyż śruby łapały powietrze.
Manewrowość to coś czego okręt nie znałby w ogóle, gdyby nie stery strumieniowe, oraz niezależne obroty śrub. Sam ster to ABSOLUTNIE za mało by skręcić z jakimkolwiek rozsądnym promieniem na powierzchni. Podczas zanurzenia jest trochę lepiej (pomaga górny ster). Dodatkowo jak w każdym modelu wielosilnikowym, występowały różnice w prędkości obrotowej silników i to dość spore. Na razie skalibrowałem to z poziomu aparatury – tzw. krzywe (bezcenna rzecz) pozwalają na niesymetryczne wysyłanie sygnału do silników, jak jeden dostaje sygnał „do przodu 40%” to drugi – ten, który kręci się wolniej, dostanie w tym samym momencie sygnał „do przodu 48%” w ten sposób, bez trymowania sterem można wyregulować okręt. W przyszłości zastanowię się nad tak zwanym „governorem” – urządzeniem stworzonym specjalnie do modeli wielosilnikowych wyrównującym ich prace.



Po tych korektach okręt zaczął zachowywać się prawidłowo, a pływanie stało się czystą przyjemnością. Po kilku minutach pływania można spokojnie przyzwyczaić się do zachowania modelu w tej skali, a trzeba tu zaznaczyć, że jest to coś zupełnie innego niż modele o wyporności prawie 10 krotnie mniejszej jak Seawolf i VIIC. Elektronika jest w 100% warta swojej ceny, a mokry, pełny detali kadłub po prostu powala.

W 2010 roku powstał tylko taki krótki materiał video z mojego drugiego pływania Typhoonem. Niestety koniec lata i jesień nie dopisały tamtymi czasy pod względem pogody. Ciągłe deszcze i bardzo niska temperatura skutecznie odstraszały od zabawy tym wspaniałym modelem. No nic, budowałem go ponad dwa lata, więc mogę poczekać jeszcze trochę. (i rzeczywiście: model czekał na niemal cotygodniowe pływanie, aż do 2016 roku)
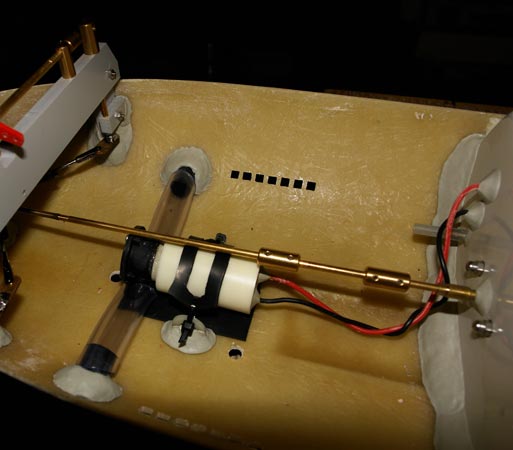
Aktualizacja 15.06.2016r.
 W maju 2016 Typhoon przeszedł niewielką modyfikację. Dostał trzeci zbiornik balastowy oparty na konstrukcji tłoka o pojemności zaledwie 90ml. Do czego służy tak mały zbiornik? Otóż do bardzo dokładnego trymowania. Zbiornik ten jest w pełni proporcjonalny i pozwala na trym z dokładnością 1,5 grama. Jedna sekunda pracy zbiornika odpowiada wpompowaniu lub wypompowaniu wody właśnie o masie 1,5 grama. Zbiornikiem steruje kontroler mojego projektu. Wstępne testy wykazały, że system działa prawidłowo i jest szczelny. Czy się sprawdzi pokaże sezon 2016.
W maju 2016 Typhoon przeszedł niewielką modyfikację. Dostał trzeci zbiornik balastowy oparty na konstrukcji tłoka o pojemności zaledwie 90ml. Do czego służy tak mały zbiornik? Otóż do bardzo dokładnego trymowania. Zbiornik ten jest w pełni proporcjonalny i pozwala na trym z dokładnością 1,5 grama. Jedna sekunda pracy zbiornika odpowiada wpompowaniu lub wypompowaniu wody właśnie o masie 1,5 grama. Zbiornikiem steruje kontroler mojego projektu. Wstępne testy wykazały, że system działa prawidłowo i jest szczelny. Czy się sprawdzi pokaże sezon 2016.

Aktualizacja 13.09.2019r.
Remont po 10 latach użytkowania modelu.
Po blisko dekadzie użytkowania Typhoona postanowiłem wyremontować model. Remont odbył się w lipcu 2019 roku. Co wymagało naprawy? Po 10 latach zepsuł się jeden ze sterów strumieniowych, odkleiła się część żywicznych detali kadłuba, a sam model błagał o nową farbę.
Jak model wyglądał przed remontem dowiesz się z filmiku poniżej. Film dużo mówi o jakości elementów z zestawu firmy Engel i dlaczego tezestawy są warte tych kosmicznych cen.
Pierwszym etapem remontu było zdarcie poprzedniej farby, może nie w całości, ale na pewno tam gdzie schodziła bez większych problemów. Nie chciałem zdzierać farby do „gołego” laminatu, gdyż szkoda mi było detali kadłuba, które poprzez za mocne ścieranie można uszkodzić.
W trakcie pracy:



Proces nakładanie nowej farby, cierpliwi, którzy obejrzeli film „przed remontem” zobaczą, że cała dolna część kadłuba została zeszlifowana i wygładzona:


Dalsza relacja z remontu już wkrótce.
Ostatnia aktualizacja relacji z budowy: 13.09.2019 r.
Kopiowanie i wykorzystywanie materiałów wyłącznie za zgodą autora strony.