Technika – czyli co trzeba wiedzieć oraz niezbędne technologie w jakie zostanie wyposażony zdalnie sterowany model okrętu podwodnego.
Spis treści:
– Stery głębokosci
– Typy modeli – statyczny i dynamiczny
– Rodzaje systemów zanurzenia
– Wielkość (pojemność) zbiornika balastowego
– Metody uszczelniania elementów ruchomych
– Redukowanie zakłóceń
– Trymowanie
Aby zrozumieć w jaki sposób zanurzają się modele, trzeba mieć ogólne pojęcie o tym, co pozwala zanurzać się oryginałom…
Okręty podwodne posiadają skomplikowane systemy zanurzenia, składające się z wielu zbiorników balastowych: głównych, trymujących, uzupełniających itp. Wszystko sterowane mnóstwem zaworów. Są one połączone ze zbiornikami ze sprężonym powietrzem. Okręt pływając po powierzchni posiada dodatnią pływalność, gdyż w owych zbiornikach jest powietrze. Gdy ma się zanurzyć, zostają otwarte odpowietrzniki i zbiorniki balastowe zostają zalane wodą, która wpływa do nich przez otwory denne. Okręt zyskuje pływalność neutralną lub ujemną – zanurza się i może płynąć pod powierzchnią wody. Gdy ma się wynurzyć, woda zostaje wypchnięta ze zbiorników balastowych za pomocą sprężonego powietrza i okręt odzyskuję dodatnią pływalność.
Stery głębokości:
Okręty podwodne prócz sterów kierunku posiadają także stery głębokości. Są to poziomo ułożone stery, które dzielimy na rufowe oraz dziobowe. Gdy okręt uzyskuje mniej więcej neutralną pływalność, jego głębokość podczas ruchu może być regulowana przez odpowiednie wychylenia sterów głębokości.
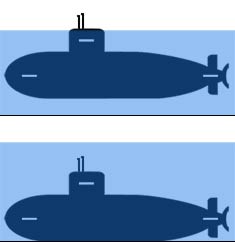
Przednie stery mogą być zamontowane na dziobie okrętu lub na jego kiosku. Montowanie przednich sterów na dziobie ma swoje zalety jak i wady, tak samo w przypadku zamontowania ich na kiosku – większość różnic dotyczy jednak właściwości typowo taktycznych, nie przydatnych w naszych modelach. Jedynym czynnikiem, który modelarz może brać pod uwagę jest sterowność. Pod tym względem lepsze są stery umieszczone na nosie, jako że są dalej od środka ciężkości okrętu, więc ich skuteczność w manewrowaniu jest większa. Różnice są dość spore, o czym przekonałem się konstruując obydwie wersje Seawolfa, jednego ze sterami na dziobie – U1, drugiego ze sterami na kiosku – U2. W prawdziwych okrętach podwodnych rufowe i dziobowe stery kontrolowane są niezależnie. Po przekroczeniu pewnej prędkości (w zanurzeniu) dziobowe stery głębokości ustawiano w pozycji neutralnej lub jeżeli jest taka możliwość były chowane do kadłuba i drobne korekty wprowadzano używając tylko rufowych sterów.
|
|
 Przednie stery umieszczone na dziobie okręt klasy Vanguard
Przednie stery umieszczone na dziobie okręt klasy Vanguard Przednie stery umieszczone na kiosku. Okręt klasy Collins
Przednie stery umieszczone na kiosku. Okręt klasy CollinsStery rufowe także mogą różnić się swoim położeniem, w ich skład nie wchodzą już tylko stery głębokości, ale także i stery kierunku. Mogą być przed lub za śrubą, mogą też być w usterzeniu typu X. Tutaj jednak różnice w sterowności nie są tak drastyczne, choć nadal odczuwalna jest zasada, że im dalej od środka ciężkości tym lepsza sterowność. Ster kierunku jest zwykle krótszy na dole niż na górze, jest to niezbędne, aby okręt mógł osiąść na dnie. W przypadku sterów typu X, nie możemy odróżnić steru kierunku i głębokości, gdyż do obydwu tych manewrów wykorzystywane są wszystkie 4 stery. Przy usterzeniu X, zarówno w przypadku oryginałów jak i modeli, potrzebny jest komputer do prawidłowego funkcjonowania sterów. Tradycyjne usterzenie mogło i może być sterowane manualnie.
 |
 |
 |
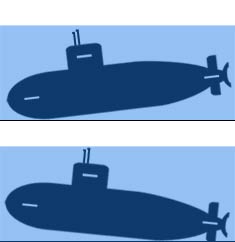
Na samym początku manewru tylne stery pochylane są delikatnie do dołu, aby unieść rufę okrętu do góry. Za duży wychył tylnych sterów głębokości spowoduje, iż śruba napędowa zacznie wystawać ponad powierzchnię wody i zmniejszy swoją sprawność, utrudniając manewr, stąd wychylenie tylnych sterów musi być delikatne. W tym samym czasie przednie zostają wychylone do góry, aby „pociągnęły” dziób pod wodę. Okręt pochyla się do przodu i pchany przez śrubę zaczyna się zanurzać – płynąć delikatnym ukosem w dół. Podczas tego manewru tylne stery zostają ustawione w pozycji neutralnej. Gdy okręt uzyskuje żądaną głębokość przednie stery zostają wychylone do dołu (podniesienie dziobu), a tylne w górę (opuszczenie rufy), utrzymuje się takie ich położenie dopóki okręt nie jest znów wypoziomowany. Kiedy to się stanie przednie i tylne zostają zablokowane w pozycji neutralnej. Gdy system balastowy jest wytrymywany na tyle aby dawać łodzi neutralną pływalność, zmiana głębokości jest osiągana tylko w ten sposób.

Tak jest w wielkim uogólnieniu w prawdziwych, pełnowymiarowych okrętach. W modelach ruchy sterów mogą być trochę uproszczone, można też spotkać inne niż opierające się na sprężanym powietrzu rozwiązania systemów balastowych. Musiałem jednak opisać podstawy, gdyż zasady rządzące jednymi i drugimi są takie same.
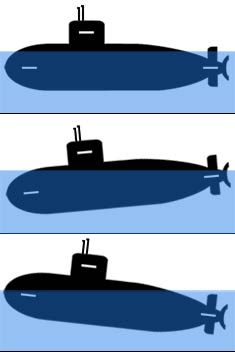
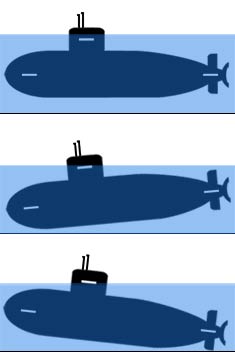
Stery głębokości w większości modeli z systemem balastowym (statycznych nurków) pracują w trochę uproszczonym względem oryginałów trybie, który możemy zobaczyć na animacjach poniżej. Jeżeli posiadamy radio z komputerem nic nie stoi na przeszkodzie, aby mikser obsługiwał stery w taki sposób jaki opisuję wcześniej – wychylenia przednich i tylnych sterów mogą być wtedy nieliniowe, a po przekroczeniu pewnej prędkości przednie mogą się fiksować w pozycji neutralnej lub mieć bardzo ograniczone wychylenia.
Ruchome obrazki przedstawiające sposób pracy sterów dziobowych i rufowych razem:
|
|
|

Niektóre modele są zdolne do bardzo dużych prędkości w zanurzeniu. Dlatego do takich jednostek jak np: Akula nierzadko montuje się naprawdę potężne silniki. Proporcje oraz kształt kadłuba powstały właśnie z myślą o dużych prędkościach podwodnych, jedynym problemem pozostaje kontrola nad modelem.Człowiek po prostu za wolno reaguje na pochylenia okrętu przez co model może mieć tendencję do „delfinich skoków” lub co gorsza uderzyć dziobem o dno. Aby temu zaradzić można wykorzystać tak zwany pitch controler, czyli jakby automatyczną poziomicę, która zareaguje szybciej na pochył i go rekompensuje zanim człowiek w ogóle coś zauważy. Oczywiście sygnał z nadajnika jest nadrzędny. Odpowiednikiem tego urządzenia jest żyroskop zamontowany w modelu samolotu. Pitch Controler i żyroskop to jednak dwa totalnie różne urządzenia i nie można ich używać wymiennie.
Typy modeli okrętów podwodnych – statyczny i dynamiczny:
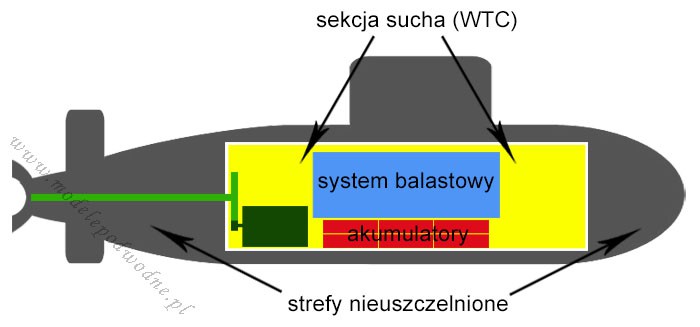
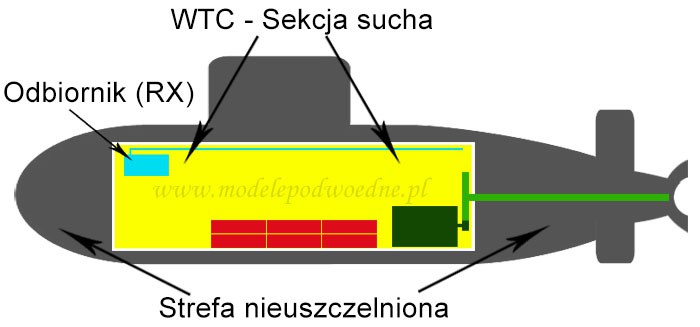
Przede wszystkim budując model okrętu podwodnego musimy wiedzieć, że uszczelnia się tylko jego fragment. Podobnie jest w przypadku jednostek oryginalnych – modele posiadają kadłub zewnętrzny, który nadaje jednostce zwykle tylko odpowiedni kształt oraz odporny na wysokie ciśnienie kadłub wewnętrzny i to on jest wodoszczelny. Pomiędzy kadłub zewnętrzny, a wewnętrzny w wielu miejscach swobodnie wpływa woda. Sekcję suchą przeznaczoną na elektronikę i mechanizmy nazywamy WTC (Water Tight Container).
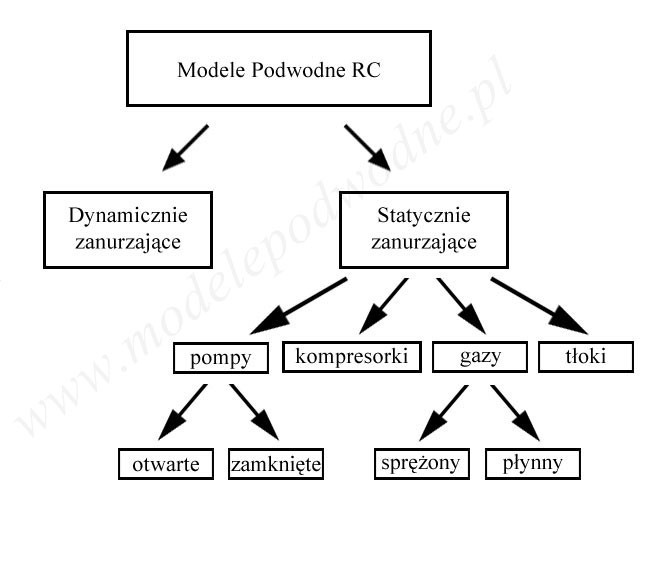
Są dwa generalne typy modeli okrętów podwodnych, modele zanurzające się dynamicznie (dynamic divers) oraz modele zanurzające się statycznie (static divers).
Pierwszy typ – model dynamiczny, jest najprostszy. Polega on na tym, że okręt zanurza się dzięki prędkości oraz sterom głębokości. Wygląda to trochę jak „nurkowanie” – okręt póki płynie szybko naprzód, a stery ustawione są w pozycji zanurzenia, jest w stanie utrzymać się pod wodą, jednakże jak tylko model zwalnia lub się zatrzymuje, wyskakuje z podwody niemal jak plastikowa butelka. Modele te charakteryzują się większymi mocniejszymi silnikami i oraz trochę większymi sterami głębokości.

Drugi typ to modele ze statycznym systemem zanurzania (static divers). Nazwa ma wskazywać na możliwość zanurzenia się takiego modelu na całkowitym postoju – kiedy silniki napędowe są wyłączone. Modele takie posiadają aktywny system balastowy, który pozwala im zanurzyć się w sposób bardziej zbliżony do oryginału. Są dużo bardziej skomplikowane niż dynamicznie nurkujące. Trzeba je o wiele dokładniej wytrymować, zarówno na powierzchni jak i pod wodą. Systemów statycznych jest kilka rodzajów, omówię teraz te najpopularniejsze.
-
system oparty na pompach (systemy zamknięte lub otwarte)
-
system oparty na kompresorach
-
system oparty na gazach (płynnych lub sprężonych)
-
system tłokowy
Kategoryzacja, którą opisałem może wydawać się skomplikowana, dlatego rozrysowałem sprawę graficznie.
System balastowy otwarty oparty na pompie:
Jeden z najprostszych systemów balastowych jaki można zamontować w modelu. Jego wielką zaletą jest prostota oraz łatwość w zebraniu niezbędnych części. Aby zanurzyć okręt otwieramy zawór blokujący wodę i włączamy pompę, która wpompowuje wodę do zbiornika. Powietrze ze zbiornika wydostaje się przez bardzo cienki (nie większy niż 2mm średnicy) odpowietrznik często wystający ponad kiosk i ukryty pomiędzy antenami i peryskopami. Gdy zbiornik się zapełni zamykamy zawór i wyłączamy pompę. Model teraz powinien mieć minimalnie dodatnią pływalność i zanurzyć się do poziomu górnej części kiosku. Dalsze zmiany głębokości uzyskujemy sterami głębokości. Aby okręt się wynurzył musimy podpłynąć do powierzchni tak, aby odpowietrznik był nad powierzchnią wody, otwieramy wtedy zawór i włączamy pompę, aby wypompowała wodę. Wadą tego systemu jest ograniczona głębokość przy parkowaniu na dnie. Ponieważ otwór wentylacyjny jest niewielkiej średnicy, nawet w przypadku sytuacji, że jest on pod powierzchnią wody – pompa wypompuje dostateczną ilość wody do częściowego wynurzania tworząc podciśnienie w zbiorniku balastowym. Zanim ciśnienie się wyrówna poprzez zassanie wody przez ten cienki otwór, okręt wynurzy się na tyle, żeby odpowietrznik znalazł się ponad powierzchnią wody. System ten jest montowany w prostych i niewielkich (do 3kg wyporności) modelach.
Podpowiedź:
Użyty może być dowolny rodzaj pompy – dwukierunkowa zębata czy perystaltyczna ale pompa musi być szybka/wydajna. Można też zastosować pompę jednokierunkową np: wirnikową, wtedy używamy jej tylko do opróżniania zbiornika, gdyż większość pomp jednokierunkowych przepuszcza wodę gdy jest wyłączona – zalanie zbiornika nastąpi samoczynnie po otwarciu zaworu, ale ciut wolniej. Wlot wody dobrze jest zabezpieczyć filtrem (np: filtrem paliwa z modeli spalinowych) aby nic nie uszkodziło pompy.
Zawór odcinający może też być zamontowany przy odpowietrzniku, zamiast przy wlocie wody, ale taka instalacja jest trochę trudniejsza oraz dużo łatwiej jest znaleźć (lub zrobić) zawór wody, niż powietrza.
System balastowy zamknięty oparty na pompie ciśnieniowej:
System oparty na pompie zdolnej wtłaczać wodę pod ciśnieniem oraz ze zbiornikiem zdolnym to ciśnienie utrzymać. Aby się zanurzyć otwieramy zawór i włączamy pompę. Pompa wtłacza wodę do zbiornika. Ponieważ powietrze nie ma gdzie uciec ulega ono sprężeniu. Takiego zbiornika nigdy nie zapełnimy do pełna. Przy bardzo wydajnej pompie uda nam się to w około 3/4 pojemności przy ciśnieniu rzędu 4,8 Bara. Gdy okręt się zanurza zamykamy zawór i wyłączamy pompę. Pompa może być jednokierunkowa (używana tylko do napełniania), gdyż samo ciśnienie jest w stanie ten zbiornik opróżnić, wystarczy by pompa miała przepływ gdy jest wyłączona. Jest to duża zaleta np: w razie awarii. Niestety chyba jedyna. Jedną z poważniejszych wad tego systemu jest trudność w znalezieniu dobrej, mocnej pompy o rozsądnych wymiarach. Taka pompa będzie też pobierała więcej energii niż inne systemy tego typu. O wiele lepszą opcją posiadającą zalety tego systemu i jednocześnie pozbawioną jego wad jest system opisany poniżej.
System balastowy zamknięty, oparty na pompie z elastycznym zbiornikiem balastowym:
System działa na podobnych założeniach co ten ze sztywnym zbiornikiem. Tutaj jednak zbiornik jest elastyczny. Tą funkcję może pełnić balon, „wkład” piłki, pakiet od kroplówki czy woreczek na mocz dla osób cewnikowanych. Zaletą tego systemu jest to, że stopień sprężenia powodowany przez wpływającą wodę jest o wiele mniejszy. Balon rozszerzając się spręża powietrze w całej sekcji suchej modelu, a nie tylko w zbiorniku. Pompa nie musi być już tak dużej mocy, a cały system wymaga mniej miejsca. Ponieważ ciśnienie jest tu mniejsze potrzebujemy jednak pompy dwukierunkowej – gdybyśmy tylko otworzyli zawór, woda będzie wypływać, ale zbiornik nie opróżni się cały z powodu za małej różnicy ciśnień. Jeśli korzystamy z innej pompy niż perystaltyczna potrzebny będzie nam też zawór. Dobrym pomysłem jest także wyłącznik bezpieczeństwa. Jest to zwykle przełącznik dźwigniowy, który odcina dopływ prądu do pompy kiedy balon jest już pełny – chroni nas w ten sposób przed jego rozerwaniem. Aby wodę można było jednak wypompować potrzebujemy specjalny układ – odcinający prąd tylko w przypadku komendy zalewania zbiornika. Alternatywą jest też po prostu otwarcie zaworu, ciśnienie wypchnie trochę wody, balon się skurczy i przestanie napierać na wyłącznik, wtedy resztę wody można już usunąć pompą. Zaletą jest także to, iż jest tam na tyle ciśnienia, aby w razie awarii pompy ciśnienie wypchnęło tyle wody, że model się wynurzy np: do poziomu kiosku. System ten zastosowałem w obydwu wersjach seawolfa i jest to naprawdę dobre rozwiązanie.
Podpowiedź:
Wlot/wylot wody do zbiornika elastycznego musi być na dole by pompa mogła wyssać całą wodę, jeżeli używamy pompy zębatej należy ją zamontować poniżej lini wodnej, wlot wody lepiej sprawdza się kiedy jest powyżej poziomu pompy i kiedy jest umieszczony poziomo. Pompy zębate mają małą moc ssącą – łatwo je zapowietrzyć, mają natomiast całkiem spore możliwości tworzenia ciśnienia.
Obok, po prawej bardzo stary filmik przedstawiający pracę systemu z elastycznym zbiornikiem jaki miałem w Seawolfie V1 i V2.
System balastowy oparty na mikro kompresorkach (RCABS):
RCABS ( Recirculating Compressed Air Ballast System) czyli mniej więcej: recylkulacyjny system balastowy na sprężone powietrze. System składa się z kompresorków oraz balonów, najczęściej dwóch – jeden dziobowy drugi rufowy. Kompresorki pompują powietrze z sekcji suchej w baloniki, w ten sposób okręt może utrzymać się na powierzchni. Ponieważ powietrze do balonów jest pobierane z sekcji suchej to wytwarza się tam podciśnienie, niekiedy całkiem spore. Wymaga to IDEALNIE szczelnej sekcji suchej. Jeżeli okręt ma się zanurzyć zostają otwarte zawory trzymające powietrze w balonach, ciśnienie się wyrównuje – balony się kurczą, a okręt się zanurza. System ten ma dwie wady, pierwszą jest owe podciśnienie w sekcji suchej – powstaje możliwość zassania wody, drugą wadą jest to, że okręt ma oryginalnie pływalność ujemną (przy nienapompowanych balonach – równych ciśnieniach).
Jednakże system przy zachowaniu dużej dokładności budowy modelu jest jednak bardzo dobrym rozwiązaniem – można np: na bieżąco regulować linię wodną. System ma swoich zagorzałych przeciwników jak i zwolenników. Wymyślił go guru modelarzy podwodnych dr. Art Broder. Jeżeli już mamy kompresorki (np: z aparatów ciśnieniowych), warto się jednak zastanowić czy nie lepiej zastosować system opisany poniżej.
Podpowiedź:
Elektrozawory pneumatyczne są o wiele łatwiej dostępne niż hydrauliczne. Wybierając elektrozawór warto więc znaleźć taki, który pobiera prąd tylko podczas otwarcia – zaoszczędzimy moc z akumulatorów. Kompresor często nie ma przepływu kiedy jest wyłączony. Wtedy zawór potrzebuje osobnego przewodu do balonika.
System balastowy oparty na mikro kompresorkach (RCABS-R):
RCABS – R ( Recirculating Compressed Air Ballast System – Reversed) Czyli: także, recylkulacyjny system balastowy na sprężone powietrze tyle, że odwrócony. System niemal identyczny jak RCABS, tutaj jednak zaczynamy z balonami już wypełnionymi powietrzem. Kompresorki tłoczą powietrze w sekcji suchej, sprężając je. Gdy balony zostaną opróżnione zamykamy zawory. Okręt zanurza się. Aby się wynurzyć po prostu otwieramy zawory, ciśnienie się wyrówna i wypełnia balony. Do prawidłowego funkcjonowania tego systemu potrzebny jest wentyl umożliwiający wytworzenie ciśnienia w sekcji suchej potrzebnego do nadmuchania balonów. Ważne jest także, aby to ciśnienie było mniej więcej zawsze takie samo, gdyż od niego zależy przebieg lini wodnej w modelu. Nie musi być to odmierzane super dokładnie, pewna dokładność jest jednak wymagana. Dodatkową zaletą tego systemu jest ciągłe zwiększone ciśnienie w sekcji suchej, które dodatkowo chroni przed dostaniem się wody do sekcji suchej.
Podpowiedź:
Same kompresorki są tanie, ekonomiczne energetycznie, i zajmują bardzo mało miejsca. Duży wzrost efektywności uzyskamy dublując systemy.
System balastowy oparty na sprężonym powietrzu:
System niemal identyczny jak w oryginalnych okrętach podwodnych. Zbiornik balastowy posiada odpowietrznik z zaworem. Gdy zawór „A” (patrz. schemat) zostaje otwarty, zbiornik zostaje zalany wodą przez otwór w dnie okrętu i jednostka zanurza się. Aby się wynurzyć zostaje otwarty zawór „B” i okręt używa sprężonego powietrza, które znajduje się w zbiorniku na sprężone powietrze. Gdy woda została wypchnięta, a okręt się wynurzył, zostaje uruchomiony kompresor, który przez „snorkel” znów napełnia zbiornik na sprężone powietrze, które zostanie użyte przy następnym wynurzeniu. Zawór „C” jest bardzo często tylko zaworem jednokierunkowym. Jest to też najbardziej skomplikowany system, świetnie sprawdza się w prawdziwych okrętach, w modelach jednak dużo mniej. Przede wszystkim zajmuje on dużo miejsca. Potrzebujemy go na zbiornik balastowy oraz na zbiornik na sprężone powietrze, który jest zwykle tylko dwa razy mniejszy od balastowego. Potrzebujemy też miejsca na minimum jeden kompresor dużej mocy oraz na kilka różnego rodzaju zaworów. Tutaj też zaczynają się schody cenowe. O ile o zbiornik na sprężone powietrze i kompresor nie będzie zbytnim wydatkiem to już reduktory ciśnienia oraz elektrozawory i ich sterowniki zaczynają budować koszta. Potrzebujemy też zawór, który odłączy prąd do kompresora w momencie, gdy w zbiorniku na sprężone powietrze otrzymamy odpowiednie ciśnienie. Należy też pamiętać, że aby kontrolować ten system potrzebujemy minimum dwa dodatkowe kanały w naszej aparaturze sterującej, o ile zawory „A” i „B” uda nam się podpiąć pod jeden, w innym wypadku potrzebujemy jeden więcej. Jeżeli chcemy mieć możliwość przeprowadzenia awaryjnego wynurzenia potrzebny będzie nam jeszcze jeden dodatkowy kanał. W dużych modelach jeżeli model nie zostanie super dokładnie wytrymowany potrzebne też będą zbiorniki trymujące – główny zbiornik balastowy daje nam wtedy pływalność neutralną, ale ujemną bądź dodatnią uzyskujemy systemami trymującymi co spowoduje znów potrzebę dodatkowego miejsca, wzrost kosztów oraz potrzebę kolejnych kanałów w aparaturze. Jeżeli marzy nam się okręt o dużych gabarytach (bo raczej tylko takie posiadają dostatecznie dużo miejsca na ten system) to naprawdę o wiele lepiej jest zainwestować w system tłokowy, którego możliwości są chyba 10krotnie większe, a cena wykonania/kupna porównywalna…
Podpowiedź:
Lepiej sprawdzić czy kompresorki nie wytwarzają podczas pracy nawet minimalnego podciśnienia lub nadciśnienia w sekcji suchej w której pracują (nie u kapitana 🙂 ). W przeciwnym wypadku podczas długiego pływania może się zrobić nie wesoło.
System balastowy oparty na gazie w płynie lub CO2:
System, który poznałem od podszewki na własnej skórze. Właściwie wykonany może dać olbrzymie możliwości. Jedyną wadą jest potrzeba kupowana gazu lub ładowania butli. Zanurzenie okrętu odbywa się przez otwarcie zaworów odpowietrznika i zalaniu zbiorników balastowych wodą. Wynurzenie, przez otwarcie zaworu zbiornika na CO2 lub płynny gaz. Gaz taki po wydostaniu się ze zbiornika zmienia swój stan na lotny i wypycha wodę ze zbiornika balastowego umożliwiając jednostce powrót na powierzchnię. System oparty na CO2 jest droższy i trochę trudniejszy w budowie ze względu na większe ciśnienia i potrzebę zastosowania reduktorów, jest jednak tańszy w eksploatacji. Gaz w płynie będzie prostszy i tańszy w budowie. Puszka 750 ml tetrafluoroetanu (rodzaj niepalnego gazu) kosztuje około 28 zł i jest dostępna jako „sprężone powietrze” do przedmuchiwania elektroniki, czy też jako gaz pędny do aerografów. Na ile starcza? Przy zbiorniku balastowym o pojemności 250ml, jedna butla starczy nam na około 120 – 140 wydmuchań – w kilku ładowaniach oczywiście. Ładowanie butli CO2 jest trochę tańsze – jakieś 20zł za 750 ml, ale trzeba korzystać z usług punktu ładowania – trzeba się dostosować do czasu ich pracy, pojechać itp. Trochę może to ograniczać pole manewru. Poza tym nie uzupełnimy CO2 nad wodą, chyba, że sami mamy jakąś większą butlę z dokręconą do niej stacją przeładowczą… Systemy CO2 oraz na płynny gaz dają szereg możliwości rozbudowy modelu. Przede wszystkim umożliwiają konstrukcję systemów pneumatycznych – realistyczne chowanie przednich sterów głębokości, anten i peryskopów na kiosku czy luków torpedowych. Ułatwiają także konstrukcję systemów torpedowych (torped gazowych), czy nawet wyrzutni rakiet (tutaj lepsze jest CO2)
Podpowiedź:
Przy konstruowaniu systemu trzeba pamiętać o paru rzeczach, pamiętajmy, że waga zbiornika na gaz się zmienia po każdym wynurzeniu, duży zbiornik – duże wahania wagi – trzeba wiedzieć jak je zrównoważyć lub gdzie umieścić zbiornik na gaz. Umiejscowienie zaworu wylotowego gazu też ma znaczenie na efektywność systemu. Ciśnienie w zbiorniku się także zmienia, a to ma wpływ na pracę zaworów. Wybór samego gazu też jest ważny – niektóre pędniki do aerografów są bardzo łatwopalne i te lepiej sobie darować.
System balastowy oparty na tłokach:
Zdecydowanie najlepszy system zanurzenia jaki został stworzony dla modeli. Działa trochę jak wielka napędzana elektrycznie strzykawka, której pojemność sięga nawet 1 litra. Woda jest zasysana lub wypychana. Tłok w cylindrze jest napędzany silnikiem elektrycznym poprzez dużą przekładnię. System pokonuje spokojnie ciśnienie jakie panuje nawet na 10 metrach. Wymaga bardzo mocnych sekcji suchych, gdyż ciśnienie jakie jest w stanie wytworzyć podczas zasysania wody (cofający się tłok w sekcji suchej) potrafi rozrywać laminaty jak papier. System daje niesamowite możliwości regulacji głębokości. Wszystko zależy jakiego sterownika użyjemy. Najprostszy działa tylko na zasadzie zalewania i opróżniania zbiornika – tylko manualna obsługa. Bardziej skomplikowane potrafią dzięki czujnikowi głębokości utrzymywać ustawioną głębokość nawet przy wyłączonych silnikach – podczas postoju/dryfu.
Istnieją oczywiście jeszcze bardziej skomplikowane – potrafią automatycznie trymować okręt – tak aby np: po odpaleniu torpedy ten nadal trzymał poziom na powierzchni i pod wodą. Bardzo często sterownik potrafi współpracować ze sterami głębokości. Są to rewelacyjne systemy o których cichaczem marzy każdy modelarz podwodny. Wadą jest ich cena, jeżeli decydujemy się kupować komplet (np: sterownik i dwa 0.5 litrowe zbiorniki na 6 Volt) wyniesie nas to około 450 euro, bardziej skomplikowane i o większej pojemności to już cena około 530 euro. Jest to jednak sprzęt pierwszorzędnej jakości, wieloletni, bardzo bezawaryjny oraz dający stałe możliwości rozbudowy. Sam zbiornik można wykonać samemu, lecz 3/4 możliwości tego systemu kryje się właśnie w sterownikach.
Wielkość (pojemność) zbiornika balastowego:
„Pojemność zbiornika balastowego musi być wystarczająca by zniwelować siłę wyporu” – tak brzmi suche zdanie z podręcznika…
Nie będę w tym miejscu tłumaczył pojęcia pływalności, ani też przeprowadzał skomplikowanych obliczeń siły wyporu. Odpowiem za to jak najprościej na jedno z najczęstszych pytań jakie dostaję na @:
„Jakiej pojemności zbiornik balastowy potrzebuję?”
Konstruując model okrętu podwodnego, na rozmiar zbiornika balastowego ma wpływ wiele czynników. Gdy jednak na spokojnie wszystko przeanalizujemy i mamy już trochę doświadczenia w budowie takich modeli, dojdziemy do prostego wniosku, że rozmiar zbiornika balastowego zawsze sprowadza się do rozmiaru sekcji suchej – WTC. Tak, sekcji suchej, a NIE całego modelu. Kadłub okrętu RC to tak naprawdę tylko dodatkowy odważnik w nietypowym kształcie. Kadłub praktycznie zawsze ma ujemną pływalność, a w razie potrzeby nie trudno też nadać mu pływalność dodatnią (ale to opisane zostanie później w dziale „Trymowanie”)
Dla modelarzy podwodnych jest jedna prosta zasada. Jeżeli model ma pływać musi ważyć mniej niż woda którą wypiera. Jeśli natomiast ma się zanurzyć, musi zmienić swoją wagę i ważyć więcej niż wyparta prze niego woda.
„OK! W takim razie ile wody wypiera mój model, kiedy jest zanurzony?”
Zapomnijmy na chwilę, że w ogóle mamy jakiś kadłub zewnętrzny i istnieje tylko WTC, które ma kształt cylindra (bo tak jest najczęściej). Aby obliczyć objętość cylindra, należy policzyć pole powierzchni zaślepki WTC i pomnożyć ją przez długość naszego WTC – ta liczba to nasza wyporność.
Przykład:
– Uprośćmy i pamiętajmy, że 100ml wody = 100 centymetrów sześciennych = 100 gramów
WTC to cylinder i średnicy 5cm i długości 40cm. To oznacza, że z wzoru na objętość cylindra: π r2 * h, czyli 3,14 * 2.5cm do kwadratu * 40cm, da nam 785cm3 objętości – tyle wody wypiera w pełni zanurzone WTC.
„Ok, znam już wyporność mojego zanurzonego WTC, do czego mi ta liczba?”
Ta liczba pozwala Ci już obliczyć masę jaką potrzebujesz, żeby WTC o wymiarach podanych powyżej zanurzyło się, gdyż zgodnie z wcześniejszymi założeniami (1cm3 = 1g) 785 centymetrów sześciennych wody = 785 gramów.
Oznacza to także, że waga całego modelu: WTC z całą niezbędną elektroniką, mechanizmami i oprzyrządowaniem oraz KADŁUBEM musi ważyć mniej niż 785 gram aby pływać na powierzchni wody.
Teraz jak policzysz ile ważą Twoje serwa, silniki, poliwęglanowa tuba, kadłub itp i wszystko sumujesz, poznasz objętość (wielkość) swojego zbiornika balastowego:
Dla Przykładu, jeśli z obliczeń (lub po prostu po zważeniu) wyszło Ci, że Twoje WTC waży 700 gram, oznacza to, że Twój zbiornik balastowy musi mieć minimalną pojemność 85ml, aby pobrać 85cm3 wody, które waży 85gram.
Jeśli WTC nabierze 85 gram wody, da to sumę 785 gram i model zanurzy się.
Odpowiedzią na pytanie w tym konkretnym przykładzie jest więc 85cm3 pojemności – jest to wielkość minimalnego zbiornika balastowego jaki powinien mieć model. Dla pewności warto dodać jeszcze 5-8%, na wypadek jakiś drobnych błędów obliczeniowych, lub bąbelków powietrza, które mogą się chować w zakamarkach kadłuba.
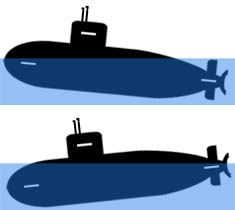
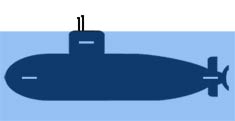
Jest jeszcze jeden sposób, aby uchronić się od przykrych niespodzianek związanych ze złą wielkością zbiornika balastowego. Szczególnie przydatny, jeśli wykonujemy konwersje dynamicznego nurka na statycznego, lub jeśli kupiliśmy model bez systemu balastowego (lub z drugiej ręki do remontu). Sposób polega na określeniu ile WTC „wystawać” będzie ponad powierzchnię wody, gdy model będzie płynął po powierzchni. Gdy już to zrobisz, liczysz objętość tej wystającej ponad powierzchnię przestrzeni. Do prawidłowego działania modelu potrzebny będzie zbiornik właśnie o takiej (mniej-więcej) pojemności. Chcąc jeszcze bardziej uprościć zrozumienie tego problemu narysowałem poniższy rysunek:
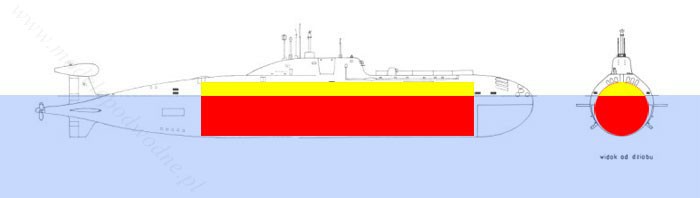
Rysunek przedstawia obrys modelu okrętu z WTC w środku. Niebieski kolor oznacza oczywiście wodę, a jej poziom pokazuje prawidłowe zanurzenie tej jednostki, gdy jest ona na powierzchni. Czerwony to część WTC, która zawsze znajduje się w zanurzeniu, żółty to część wystająca ponad powierzchnię. To właśnie objętość żółtej przestrzeni odpowiada zbiornikowi balastowemu o prawidłowej pojemności. Tak więc, jeśli objętość WTC, która wystaje ponad powierzchnię wody wynosi np. 500ml, to potrzebujemy zbiornik balastowy (np. tłok) o właśnie takiej pojemności.
Patrząc na rysunek nietrudno się domyślić, że im mniej WTC wystaje ponad powierzchnię, tym mniejszy zbiornik balastowy jest nam potrzebny. Stąd dobrym pomysłem jest użycie rury WTC o jak najmniejszej wygodnej dla nas średnicy. Mniejszą rurę zawsze można zamontować niżej lub wyżej i kontrolować w ten sposób jak duża jej ilość wystaje ponad powierzchnię wody.
Metody uszczelniania popychaczy oraz wału:
Uszczelnianie popychaczy:
Dostaję wiele zapytań na adres @ dotyczących metod uszczelniania elementów ruchomych w modelach okrętów podwodnych.
 O ile z wałem, w którym występuje tylko ruch obrotowy początkujący adepci sobie jakoś radzą, to z uszczelnieniem popychaczy, gdzie ruch jest liniowy mają już duże problemy. Metod uszczelnienia popychaczy jest dość sporo. Podobnie jak w przypadku napędu,metodę uszczelniania należy dopasować do modelu. Od jego wielkości i wyporności zależy, gdyż powierzchnia sterów, a co za tym idzie średnica samego popychacza. Jedną z metod na uszczelnienie popychacza praktycznie każdej średnicy są prezentowane na zdjęciu obok, uszczelki harmonijkowe, zwane też mieszkowymi lub gumowymi bucikami popychacza. Tutaj w rozmiarach od 35mm do 65mm (na średnice popychaczy 1mm do 5mm).
O ile z wałem, w którym występuje tylko ruch obrotowy początkujący adepci sobie jakoś radzą, to z uszczelnieniem popychaczy, gdzie ruch jest liniowy mają już duże problemy. Metod uszczelnienia popychaczy jest dość sporo. Podobnie jak w przypadku napędu,metodę uszczelniania należy dopasować do modelu. Od jego wielkości i wyporności zależy, gdyż powierzchnia sterów, a co za tym idzie średnica samego popychacza. Jedną z metod na uszczelnienie popychacza praktycznie każdej średnicy są prezentowane na zdjęciu obok, uszczelki harmonijkowe, zwane też mieszkowymi lub gumowymi bucikami popychacza. Tutaj w rozmiarach od 35mm do 65mm (na średnice popychaczy 1mm do 5mm).
 Inną metodą uszczelnienia popychaczy, jednakże tylko tych do 3mm średnicy są drążone śruby z dwoma o-ringami w środku. O-ringi mają średnicę odrobinę mniejszą niż 3mm. Owe o-ringi jak i całe wnętrze śruby dokładnie wypełniamy smarem wodoodpornym, tak żeby przy skręceniu całości jego nadmiar po prostu wypłynął. Metoda ta jest więc bardzo podobna do starej techniki grease boxów, gdzie popychacz przechodził po prostu przez cylinder wypełniony po brzegi gęstym smarem. Tutaj dodatkową ochroną stanowią o-ringi, oraz całość oferuje bardzo łatwy montaż (śruba M6) i dostęp do elementów wymagających smarowania. Wbrew pozorom metoda ta nie nadaje się do ruchu obrotowego – pamiętajmy, że to śruba. Wibracje i ruch obrotowy mogłyby spowodować jej odkręcenie, a co za tym idzie katastrofę.
Inną metodą uszczelnienia popychaczy, jednakże tylko tych do 3mm średnicy są drążone śruby z dwoma o-ringami w środku. O-ringi mają średnicę odrobinę mniejszą niż 3mm. Owe o-ringi jak i całe wnętrze śruby dokładnie wypełniamy smarem wodoodpornym, tak żeby przy skręceniu całości jego nadmiar po prostu wypłynął. Metoda ta jest więc bardzo podobna do starej techniki grease boxów, gdzie popychacz przechodził po prostu przez cylinder wypełniony po brzegi gęstym smarem. Tutaj dodatkową ochroną stanowią o-ringi, oraz całość oferuje bardzo łatwy montaż (śruba M6) i dostęp do elementów wymagających smarowania. Wbrew pozorom metoda ta nie nadaje się do ruchu obrotowego – pamiętajmy, że to śruba. Wibracje i ruch obrotowy mogłyby spowodować jej odkręcenie, a co za tym idzie katastrofę.
Uszczelnianie wału napędowego:
 Najlepszą metodą uszczelniania wału jest… kupienie gotowego, renomowanej firmy. Niestety, taka prawda. Prezentowane obok na zdjęciu 180mm wały firmy Marx są prawdziwymi Mercedesami w swojej dziedzinie. Wykonane ze stali nierdzewnej na tokarce numerycznej, łożyskowane, z tłumieniem drgań, zakończone podwójną uszczelką wargową z każdej strony. Jakość jest naprawdę powalająca, są one bezobsługowe, nie potrzebują dodatkowego smarowania i dają absolutną pewność jeśli chodzi o szczelność i długą niezawodność. Wadą jest ich cena – kupując je w 2008 płaciłem 20 funtów za sztukę. Oczywiście tradycyjne mosiężne wały, smarowane suto towotem, także bardzo dobrze dają sobie radę, trzeba jednak pilnować w jakim stanie są uszczelki, poziom smaru oraz mają dużo większe opory.
Najlepszą metodą uszczelniania wału jest… kupienie gotowego, renomowanej firmy. Niestety, taka prawda. Prezentowane obok na zdjęciu 180mm wały firmy Marx są prawdziwymi Mercedesami w swojej dziedzinie. Wykonane ze stali nierdzewnej na tokarce numerycznej, łożyskowane, z tłumieniem drgań, zakończone podwójną uszczelką wargową z każdej strony. Jakość jest naprawdę powalająca, są one bezobsługowe, nie potrzebują dodatkowego smarowania i dają absolutną pewność jeśli chodzi o szczelność i długą niezawodność. Wadą jest ich cena – kupując je w 2008 płaciłem 20 funtów za sztukę. Oczywiście tradycyjne mosiężne wały, smarowane suto towotem, także bardzo dobrze dają sobie radę, trzeba jednak pilnować w jakim stanie są uszczelki, poziom smaru oraz mają dużo większe opory.
 Simering, trudno mi pisać o tym rozwiązaniu, gdyż wiem, że jest ono jednym z najpopularniejszych rozwiązań jako uszczelnienie wału, ale jednocześnie tym, które przez wiele lat najmniej wzbudzało moje zaufanie. Nie tylko w wałach napędowych, ale także w pompach. Jest jednak łatwo dostępne, dość tanie i proste w użyciu. Dodatkowo, jeśli zaprojektujemy model tak, że dostęp do uszczelki w razie potrzeby jej wymiany i smarowania będzie prosty to rozwiązanie może okazać się bezkonkurencyjne. Wymiana tej taniej uszczelki raz na dwa sezony na pewno zapewni modelowi bezpieczeństwo. Wszystko, jak zwykle zresztą, sprowadza się do dobrego projektu i wyboru odpowiedniego uszczelnienia do charakterystyki modelu.
Simering, trudno mi pisać o tym rozwiązaniu, gdyż wiem, że jest ono jednym z najpopularniejszych rozwiązań jako uszczelnienie wału, ale jednocześnie tym, które przez wiele lat najmniej wzbudzało moje zaufanie. Nie tylko w wałach napędowych, ale także w pompach. Jest jednak łatwo dostępne, dość tanie i proste w użyciu. Dodatkowo, jeśli zaprojektujemy model tak, że dostęp do uszczelki w razie potrzeby jej wymiany i smarowania będzie prosty to rozwiązanie może okazać się bezkonkurencyjne. Wymiana tej taniej uszczelki raz na dwa sezony na pewno zapewni modelowi bezpieczeństwo. Wszystko, jak zwykle zresztą, sprowadza się do dobrego projektu i wyboru odpowiedniego uszczelnienia do charakterystyki modelu.
 Nasmarowany wężyk nałożony na pręt (wał) i tulejkę otulającą. Najmniej znane rozwiązanie wśród modelarzy. Przez wiele lat stosowane jednak w zestawach Engela i to powinno być wystarczającą rekomendacją. Wbrew pozorom nie jest takie proste. Wężyk nałożony na wał i rurkę otulającą nie jest chińskim plastikowym wężykiem, takim jakie możemy kupić na metry w markecie budowlanym, ani silikonowym przewodem paliwowym. Bliżej mu do rurek używanych przy dializie w szpitalu. Jego średnica musi być bardzo dobrze dobrana do grubości wału. Zalety jednak są oczywiste: kontrola uszczelnienia wygląda tak, że po prostu obracamy wał parę razy i przyglądamy się przezroczystej uszczelce. Wymiana zajmuje mniej niż 2 minuty, a jeżeli zaopatrzymy się w metr takiej rurki, zapas materiału mamy na długie lata. Niektórzy stosują tą metodę także do popychaczy. Otrzymujemy wtedy uszczelnienie obrotowe i dźwignie serwa montujemy poza sekcją suchą.
Nasmarowany wężyk nałożony na pręt (wał) i tulejkę otulającą. Najmniej znane rozwiązanie wśród modelarzy. Przez wiele lat stosowane jednak w zestawach Engela i to powinno być wystarczającą rekomendacją. Wbrew pozorom nie jest takie proste. Wężyk nałożony na wał i rurkę otulającą nie jest chińskim plastikowym wężykiem, takim jakie możemy kupić na metry w markecie budowlanym, ani silikonowym przewodem paliwowym. Bliżej mu do rurek używanych przy dializie w szpitalu. Jego średnica musi być bardzo dobrze dobrana do grubości wału. Zalety jednak są oczywiste: kontrola uszczelnienia wygląda tak, że po prostu obracamy wał parę razy i przyglądamy się przezroczystej uszczelce. Wymiana zajmuje mniej niż 2 minuty, a jeżeli zaopatrzymy się w metr takiej rurki, zapas materiału mamy na długie lata. Niektórzy stosują tą metodę także do popychaczy. Otrzymujemy wtedy uszczelnienie obrotowe i dźwignie serwa montujemy poza sekcją suchą.
Redukowanie zakłóceń:
Prócz specjalistycznych urządzeń takich jak czujniki pochyłu lub ciśnienia, sterowniki pomp i bardzo rzadkie regulatory typu „navy”, nie ma czegoś takiego jak akcesoria modelarskie do modeli okrętów podwodnych. Większość dostępnego na rynku sprzętu została zaprojektowana do działania w modelach samolotów, mniejsza część do modeli samochodów. Twórcy tych układów założyli, że ich urządzenia będą w suchym, stabilnym środowisku, a anteny zostaną wyciągnięte na pełną swoją długość w pozycji bliskiej pionowej. Modele okrętów podwodnych wystawiają więc elektronikę modelu na najtrudniejszy możliwy sprawdzian. Wilgoć i szybkie zmiany temperatury, to coś z czym elektronika wita się na dzień dobry. Dodajmy do tego niewielką ilość miejsca uniemożliwiającą pełne rozciągnięcie anteny, niemożność ułożenia jej z dala od regulatorów, serw i silników oraz wytłumienie sygnału poprzez grube kadłuby wodoszczelne i wodę. O braku możliwości ustawienia jej w pozycji pionowej już nawet nie wspomnę. Znam przypadki, gdzie z powodu źle umieszczonych elementów modelu serwa zaczynały bardzo mocno drgać już przy najmniejszych obrotach głównego silnika (lub pompy). Ludzie tacy tracili kontrolę nad swoimi modelami już 4 metry od radia! Jednakże, znam też takich, którzy mając model na głębokości 1 metra mieli nad nim pełną kontrolę w odległości 70 metrów, co jest wynikiem wyśmienitym. Pragę zaznaczyć, że te same radia, gdy kontrolują model latający osiągają (w zależności od jakości) od 700m do nawet 4km zasięgu! To pokazuje jak ciężkie warunki panują w modelach okrętach podwodnych. Do modeli okrętów podwodnych absolutnie nie nadaje się sprzęt działający w paśmie 2,4Ghz. Nie ważne, jak bardzo taką aparaturę zachwalałby sprzedawca. Ta częstotliwość nie penetruje wody. Dobrym wyborem są „tradycyjne” radia w technologii 40Mhz i 35Mhz (coraz więcej krajów znosi idiotyczny przepis zakazujący używania częstotliwości 35Mhz dla modeli innych niż latające) oraz 75Mhz i 72Mhz (USA i Kanada).
 Na zasięg jakim możemy dysponować sterując modelem wpływ ma przede wszystkim jakość odbiornika i w jaki sposób ułożymy jego antenę. Antena ma za zadanie jak najlepiej łapać fale radiowe. Niestety prócz fal z naszej aparatury łapie w zasadzie wszystko. Jak dużo zakłóceń dotrze do serw, regulatorów itp. zależy od jakości filtra, jaki znajduje się na wejściu sygnałowym odbiornika. O ile zakłóceń, które już „są w powietrzu” nie damy rady ograniczyć, o tyle te groźniejsze – generowane przez nasz własny model można śmiało bardzo mocno zredukować. Największym wrogiem zasięgu jest złe ułożenie odbiornika. Absolutnie, ale to absolutnie nie może on być montowany obok regulatora napięcia lub silnika elektrycznego. Kable zasilające i serwomechanizmy to także niesprzyjające sąsiedztwo. Odbiorniki nie lubią też drgań, więc dobrze jest je montować przy pomocy grubej dwustronnej taśmy, lub nawet dawać jedną warstwę jakiejś pianki absorbującej np. depron. Te same prawa tyczą się też samej anteny, układamy ją jak najdalej od kabli, silników, regulatorów i serw. Unikamy układania jej wzdłuż jakichkolwiek kabli czy elementów z metalu lub włókna węglowego, jednocześnie starając się rozłożyć na pełną jej długość. Antena absolutnie nie może pozostać zwinięta w jakikolwiek sposób, czy to gumką, czy nawinięta na coś. Antenę warto wyprowadzić na zewnątrz – poza WTC, ale musimy się upewnić, że drut będący w przewodzie nie będzie miał styczności z wodą – sprawdzamy czy izolacja nie ma pęknięć i przetarć oraz dodatkowo zalepiamy koniec anteny. Powody są dwa, pierwszy jest taki, że gdy drut ma bezpośredni kontakt z wodą poziom zakłóceń drastycznie wzrośnie. Drugi jest prozaiczny, woda potrafi poprzez uszkodzoną lub źle zaklejoną na końcu izolację przedostać się kropla po kropli, niczym przez rurkę, aż do odbiornika.
Na zasięg jakim możemy dysponować sterując modelem wpływ ma przede wszystkim jakość odbiornika i w jaki sposób ułożymy jego antenę. Antena ma za zadanie jak najlepiej łapać fale radiowe. Niestety prócz fal z naszej aparatury łapie w zasadzie wszystko. Jak dużo zakłóceń dotrze do serw, regulatorów itp. zależy od jakości filtra, jaki znajduje się na wejściu sygnałowym odbiornika. O ile zakłóceń, które już „są w powietrzu” nie damy rady ograniczyć, o tyle te groźniejsze – generowane przez nasz własny model można śmiało bardzo mocno zredukować. Największym wrogiem zasięgu jest złe ułożenie odbiornika. Absolutnie, ale to absolutnie nie może on być montowany obok regulatora napięcia lub silnika elektrycznego. Kable zasilające i serwomechanizmy to także niesprzyjające sąsiedztwo. Odbiorniki nie lubią też drgań, więc dobrze jest je montować przy pomocy grubej dwustronnej taśmy, lub nawet dawać jedną warstwę jakiejś pianki absorbującej np. depron. Te same prawa tyczą się też samej anteny, układamy ją jak najdalej od kabli, silników, regulatorów i serw. Unikamy układania jej wzdłuż jakichkolwiek kabli czy elementów z metalu lub włókna węglowego, jednocześnie starając się rozłożyć na pełną jej długość. Antena absolutnie nie może pozostać zwinięta w jakikolwiek sposób, czy to gumką, czy nawinięta na coś. Antenę warto wyprowadzić na zewnątrz – poza WTC, ale musimy się upewnić, że drut będący w przewodzie nie będzie miał styczności z wodą – sprawdzamy czy izolacja nie ma pęknięć i przetarć oraz dodatkowo zalepiamy koniec anteny. Powody są dwa, pierwszy jest taki, że gdy drut ma bezpośredni kontakt z wodą poziom zakłóceń drastycznie wzrośnie. Drugi jest prozaiczny, woda potrafi poprzez uszkodzoną lub źle zaklejoną na końcu izolację przedostać się kropla po kropli, niczym przez rurkę, aż do odbiornika.
Na ograniczenie zasięgu ma wpływ także niedbalstwo. Plątanina za długich kabli wygeneruje nam dostateczną ilość zakłóceń, żeby skutecznie ograniczyć nasz zasięg. Przeciwdziałamy temu przede wszystkim dobrym rozplanowaniem elementów modelu. Nie przedłużamy bez sensu kabli serwomechanizmów, a jeśli już trafi nam się dużo za długi kabel serwa, nawijamy go na pierścień ferrytowy. Przewody regulatorów, silników, pomp i innych „amperożernych” urządzeń powinny być jak najkrótsze. Jeżeli już musimy poprowadzić takie kable przez dłuższą część okrętu dobrze jest takie dwa przewody (plus i minus) ze sobą skręcić. To naprawdę pomaga ograniczyć zakłócenia, czego dowodem mogą być lepsze, mocniejsze, ale i droższe serwomechanizmy – do nich producenci nie dają tradycyjnej trójżyłowej tasiemki, a skrętkę.
|
|
|


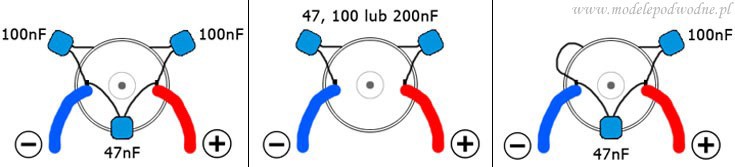
Same silniki koniecznie muszą zostać odkłócone poprzez zastosowanie odpowiednich kondensatorów, a najlepiej w tej roli spisują się ceramiczne (płytkowe). Tu mała uwaga, część silników posiada już odpowiednie kondensatory w obudowie, tuż za komutatorem – warto poświecić latarką i ich poszukać. Jak duże są różnice pomiędzy silnikiem odkłóconym, a nieodkłóconym można sprawdzić poprzez przystawienie go do radia włączonego w trybie AM. Najpierw przystawiamy silnik bez kondensatorów, a potem już z przylutowanymi, w ten sposób można też sprawdzić, czy kondensatory są sprawne. Różnice będą słyszane w postaci szumów z głośników.
Trymowanie
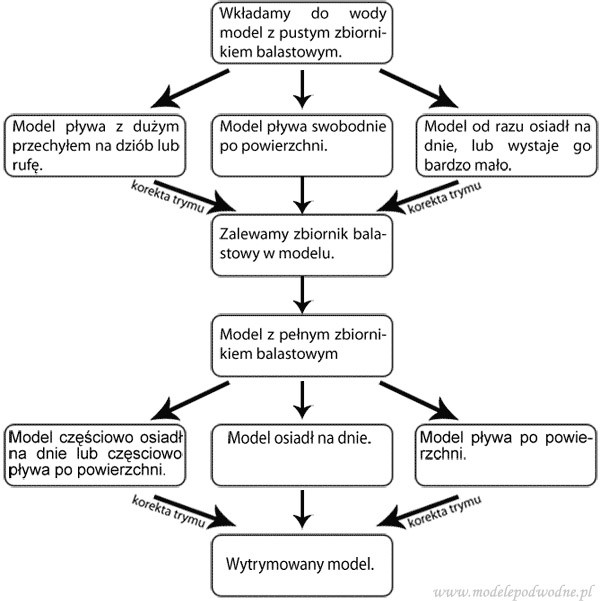
 Trym – w żegludze jest to określenie pochylenia statku w stronę dziobu lub rufy. W przypadku modeli okrętów podwodnych zadanie jest dodatkowo utrudnione, gdyż okręt musimy wytrymować zarówno na powierzchni jak i w zanurzeniu. Dodatkowo zmiana trymu powierzchniowego często powoduje zmianę trymu podwodnego i odwrotnie. Całość komplikuje się jeszcze bardziej, jeśli chcemy mieć prawidłową linię wodną na powierzchni i neutralną pływalność w zanurzeniu. Do tego etapu budowy potrzebne nam będą ołowiane, cynkowe lub stalowe odważniki (dostępne w sklepach wędkarskich i u wulkanizatora) oraz twarda, odporna na wodę i zgniecenia pianka lub styropian (np. styrodur). Sposoby trymowania są różne, ogólnie jest to długa, nużąca i denerwują czynność. Dobrze wykonana przyniesie doskonałe efekty w przyszłym użytkowaniu modelu. Tutaj podaje swój sposób, moim zdaniem najlepszy i najłatwiejszy. Trymujemy gotowy, pomalowany model w którym na stałe zamontowane są już wszystkie elementy. Trymowanie to skomplikowany proces, więc by ułatwić jego zrozumienie wykonałem graf potencjalnych scenariuszy. Jest to maksymalne możliwe uproszczenie i może być traktowane tylko jako pomoc dodatkowa. Ma za zadanie pomóc zorientować się w którym momencie procesu trymowania jesteśmy. Musimy też pamiętać, że czasami, by zrobić to dobrze, należy wykonać krok w tył i coś poprawić.
Trym – w żegludze jest to określenie pochylenia statku w stronę dziobu lub rufy. W przypadku modeli okrętów podwodnych zadanie jest dodatkowo utrudnione, gdyż okręt musimy wytrymować zarówno na powierzchni jak i w zanurzeniu. Dodatkowo zmiana trymu powierzchniowego często powoduje zmianę trymu podwodnego i odwrotnie. Całość komplikuje się jeszcze bardziej, jeśli chcemy mieć prawidłową linię wodną na powierzchni i neutralną pływalność w zanurzeniu. Do tego etapu budowy potrzebne nam będą ołowiane, cynkowe lub stalowe odważniki (dostępne w sklepach wędkarskich i u wulkanizatora) oraz twarda, odporna na wodę i zgniecenia pianka lub styropian (np. styrodur). Sposoby trymowania są różne, ogólnie jest to długa, nużąca i denerwują czynność. Dobrze wykonana przyniesie doskonałe efekty w przyszłym użytkowaniu modelu. Tutaj podaje swój sposób, moim zdaniem najlepszy i najłatwiejszy. Trymujemy gotowy, pomalowany model w którym na stałe zamontowane są już wszystkie elementy. Trymowanie to skomplikowany proces, więc by ułatwić jego zrozumienie wykonałem graf potencjalnych scenariuszy. Jest to maksymalne możliwe uproszczenie i może być traktowane tylko jako pomoc dodatkowa. Ma za zadanie pomóc zorientować się w którym momencie procesu trymowania jesteśmy. Musimy też pamiętać, że czasami, by zrobić to dobrze, należy wykonać krok w tył i coś poprawić.
Czynności przed trymowaniem:
– Upewnij się, że model jest całkowicie wodoszczelny.
– Wkładamy model do naszego zbiornika testowego i ręką przytrzymujemy go parę sekund pod wodą mocno nim ruszając. Pozbywamy się w ten sposób części napięcia powierzchniowego w jego zakamarkach.
– Upewniamy się, że wlot wody systemu balastowego znajduje się pod powierzchnią wody. Rodzaj systemu nie jest ważny. Ważne jest, by 2-3 razy zalać i opróżnić całkowicie zbiornik. W ten sposób mamy pewność, że system został odpowietrzony. Im mniej pęcherzyków, tym dokładniej wytrymujemy okręt.
Trymowanie -proces:
Wkładamy model z pustym zbiornikiem balastowym do wody. Od tego jak się teraz zachowa zależy całe postępowanie przy trymowaniu. Dlatego opis trymowania jest podzielony na dwa działy:
-
Scenariusz 1. Model pływa – ma dodatnia pływalność przy pustym zbiorniku balastowym
-
Scenariusz 2. Model nie pływa, tylko od razu się zanurza i osiada na dnie zbiornika testowego – ma pływalność ujemną przy pustym zbiorniku balastowym.
Scenariusz 1 – Model po włożeniu do wody ma pływalność dodatnią – pływa równo lub nie równo, ale utrzymuje się na powierzchni.
– Po włożeniu do wody model powinien spokojnie i poziomo pływać po powierzchni. Jeżeli nie, to w miejscach, które są za wysoko linii wodnej (np. rufa jest tak wysoko, że śruba wystaje z wody) montujemy dodatkowy balast (np. cynę, ołów, stal) – dociąży on ten miejsca modelu, które wystają z wody za bardzo.
Jeżeli są też miejsca, które znajdują się za głęboko, to w tej części okrętu, jak najwyżej, ale jednocześnie poniżej planowanej linii wodnej montujemy twardą piankę (styrodur) lub styropian. Pianka dodaje wyporności, dokładamy jej więc w tej części modelu, która znajduje się głębiej w wodzie. Do montowania pianki doskonała jest wodoodporna taśma dwustronna. W ten sposób korygujemy wstępnie trym nawodny.
Ponieważ jeden rysunek jest wart tysiąc słów, schematy po prawej przedstawiają potencjalne sytuacje jakie mogą nas spotkać podczas trymowania naszego gotowego modelu.
Scenariusz 1 – Zalewamy zbiornik balastowy. Po zalaniu zbiornika model może zachować się różnie np. :
– Model (lub jego część) nie zanurza się i jest nadal na powierzchni.Jeśli model jest poziomo i tuż pod powierzchnią wody delikatnie popychamy go w kierunku dna i obserwujemy jego zachowanie. Jeśli został już na dnie to znaczy, że gdzieś w zakamarkach nadal mieliśmy pęcherzyki powietrza i nie należy się nimi przejmować, gdyż podczas normalnego pływania zostaną wypchnięte przez ruch okrętu.
– Jeśli model wraca na powierzchnię, prosto lub krzywo to badamy jakie jest jego pochylenie, czy jest rufowe czy dziobowe. Jeśli któryś z możliwych przechyłów występuje, zaczynamy dokładać dodatkowy balast, np. cynę lub ołów, w tej części okrętu, która jest wyżej względem powierzchni wody. Jeśli okręt ma bardziej zanurzony dziób, a rufa nadal jest wysoko nad powierzchnią, zaczynamy dokładać balast właśnie w tylnej jego części, aż do momentu, gdy uda nam się osiągnąć poziom. Gdy to już się uda zaczynamy bardzo pomału dokładać balast zarówno na dziobie jak i rufie, do momentu aż okręt zacznie się zanurzać i delikatnie osiądzie na dnie. W ten sposób osiągnęliśmy pływalność ujemną, która pozwoli nam osiąść na dnie.
 – Oczywiście najbardziej pożądana jest sytuacja idealna, kiedy to po zalaniu zbiornika balastowego model równo i pomału zanurzy się, by w końcu opaść na dno. Przy dobrze zamontowanym WTC i dostatecznie dużym zbiornikiem balastowym umieszczonym w centrum sytuacja wielce prawdopodobna.
– Oczywiście najbardziej pożądana jest sytuacja idealna, kiedy to po zalaniu zbiornika balastowego model równo i pomału zanurzy się, by w końcu opaść na dno. Przy dobrze zamontowanym WTC i dostatecznie dużym zbiornikiem balastowym umieszczonym w centrum sytuacja wielce prawdopodobna.
Scenariusz 1 – Pierwsze opróżnienie zbiornika balastowego po korektach trymu:
– Gdy już wykonamy te czynności, opróżniamy całkowicie zbiornik balastowy, by po korektach trymu podwodnego sprawdzić trym nawodny. Okręt powinien bez problemu pływać po powierzchni. Jednakże, tu znów mogą nas spotkać różne sytuacje:

– Sytuacja pierwsza: byliśmy dokładni przy projekcie (i mieliśmy trochę szczęścia), więc okręt ma już niezłą linię wodną. Wystaje go odpowiednio dużo, ale śruba jest dostatecznie zanurzona, aby nie „łapać” powietrza, dalsza korekta trymu jest jedynie kosmetyczna, ale do prawidłowego funkcjonowania modelu nie jest potrzebna.
– Sytuacja druga jest najgorszą możliwą – okręt siedzi za głęboko w wodzie (np. wystaje tylko kiosk, bez kawałka kadłuba). Oznacza on błąd w założeniach konstrukcji. Najczęściej, że mamy za mały zbiornik balastowy lub, że część sucha okrętu (WTC), jest zamontowana za wysoko w modelu.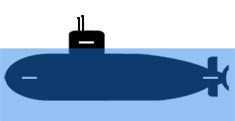 Tutaj pomoże tylko umieszczenie WTC niżej lub powiększenie zbiornika balastowego. Są to już bardzo poważne modyfikacje, więc proces trymowania należy przerwać. Dopiero po poprawieniu błędów konstrukcyjnych można przystąpić do ponownego trymowania, od początku. Oczywiście można poświęcić linię wodną i pływać w ten sposób, jeżeli komuś to nie przeszkadza, gdyż nie wpłynie to na korzystanie z modelu, tylko źle wygląda.
Tutaj pomoże tylko umieszczenie WTC niżej lub powiększenie zbiornika balastowego. Są to już bardzo poważne modyfikacje, więc proces trymowania należy przerwać. Dopiero po poprawieniu błędów konstrukcyjnych można przystąpić do ponownego trymowania, od początku. Oczywiście można poświęcić linię wodną i pływać w ten sposób, jeżeli komuś to nie przeszkadza, gdyż nie wpłynie to na korzystanie z modelu, tylko źle wygląda.
– Trzecia sytuacja jaka może nas spotkać po opróżnieniu zbiornika balastowego jest taka, że okręt siedzi za wysoko. Wtedy sprawa wygląda bardzo dobrze, gdyż daje nam szereg możliwości. Jeżeli okręt trzyma poziom, a śruba napędowa nie wystaje z wody (lub nie jest tuż pod powierzchnią) to okręt można uznać już wytrymowany. Wszystko zależy od tego jak bliscy oryginałowi chcemy być. Jeżeli jednak chcemy osiągnąć prawidłową linię wodną, to stoimy przed możliwością „dotrymowania” modelu poprzez dołożenie balastu. Dodatkowym pozytywnym skutkiem tej operacji jest to, że model będzie potrzebował mniej wody, aby się zanurzyć. Manewr zanurzenia będzie trwał krócej. Równe dokładanie ołowiu nie powinno mieć wpływu na trym podwodny. Wyjątkiem jest sytuacja, gdy prawidłowy trym okrętu, polega na lekkim przechyleniu na rufę, wtedy sytuacja się komplikuje i należy sprawdzić dokładniej trym podwodny.
Jeżeli jednak chcemy osiągnąć prawidłową linię wodną, to stoimy przed możliwością „dotrymowania” modelu poprzez dołożenie balastu. Dodatkowym pozytywnym skutkiem tej operacji jest to, że model będzie potrzebował mniej wody, aby się zanurzyć. Manewr zanurzenia będzie trwał krócej. Równe dokładanie ołowiu nie powinno mieć wpływu na trym podwodny. Wyjątkiem jest sytuacja, gdy prawidłowy trym okrętu, polega na lekkim przechyleniu na rufę, wtedy sytuacja się komplikuje i należy sprawdzić dokładniej trym podwodny.
– Czwarta możliwa sytuacja wygląda tak, że okręt mimo iż siedzi wysoko na powierzchni ma jakiś wyraźny przechył na dziób lub rufę. Tutaj korekty przeprowadzamy poprzez niewielkie dołożenie ołowiu tam, gdzie okręt siedzi za wysoko. Wpływ tej operacji na trym podwodny jest wielce prawdopodobny, więc korekta trymu podwodnego będzie prawdopodobnie wymagana. Przeprowadzamy ją w sposób opisany przeze mnie wcześniej – dodając pianki/styropianu tam, gdzie okręt opada zbyt mocno. Jednakże, by nie zakłócić trymu nawodnego, piankę lub styropian przyklejamy TYLKO powyżej linii wodnej.
Scenariusz 1 – Pływalność Neutralna – krok opcjonalny nie dla wszystkich typów modeli.
– Następnym krokiem jest opróżnienie zbiorników balastowych w taki sposób by było w nich nadal 85-95% wody (jeżeli nasz system zanurzenia umożliwia częściowe zalanie). Teraz nasza jednostka powinna posiadać pływalność mniej więcej neutralną np. z wody może wystawać tylko sam szczyt kiosku, lub peryskopy (lepiej). Prawidłowa pływalność neutralna w dużej mierze zależy od systemu zanurzenia. Najłatwiej jest ją osiągnąć w systemach zamkniętych opartych na pompie, tłokowych lub RCABS (RCABS-R), gdzie mamy pełną i bardzo dokładną możliwość regulacji ilości wody w zbiorniku balastowym.
Gdy już nasz model jest w zanurzeniu może pojawić się dodatkowe utrudnienie w postaci złego trymu podwodnego. Objawia się tym, że zanurzony okręt zaczyna się przechylać na dziób lub rufę. Korektę przeprowadzamy używając jak najmniejszej ilości twardej pianki lub styropianu. Najlepiej jest przykleić ją dobrą, jak najwyżej w naszym modelu, a najlepiej powyżej linii wodnej wynurzonego modelu.
Scenariusz 2 – Model po włożeniu do wody posiada pływalność ujemną lub prawie ujemną z pustym zbiornikiem balastowym:
 – Scenariusz ten jest dużo rzadszy, jednak nadal możliwy. Polega on na tym, że okręt jest za ciężki i nawet na pustym zbiorniku balastowym idzie na dno lub siedzi bardzo głęboko w wodzie. Najczęściej zdarza się to przy bardzo małych modelach.
– Scenariusz ten jest dużo rzadszy, jednak nadal możliwy. Polega on na tym, że okręt jest za ciężki i nawet na pustym zbiorniku balastowym idzie na dno lub siedzi bardzo głęboko w wodzie. Najczęściej zdarza się to przy bardzo małych modelach.
W tym wypadku nie będziemy używać ołowiu ani cyny, a tylko i wyłącznie pianki. Zaczynamy dokładać ją na rufie i dziobie okrętu (w miarę wysoko, ale nie powyżej linii wodnej), do momentu aż model wypłynie na powierzchnię, gdy już to się stanie nadal dokładamy pianki próbując osiągnąć taką linię wodną jaką chcemy. Znów według zasady, że tam gdzie model siedzi głębiej dokładamy jej więcej.
Scenariusz 2 – zalanie zbiornika balastowego.
– Gdy to już nam się uda, zalewamy w 100% zbiornik balastowy. Tu znów mogą nas spotkać różne sytuacje:
 – Pierwsza sytuacja. Model zanurzy się, ale będzie miał przechył na dziób lub rufę (zarówno dla pływalności neutralnej jak i ujemnej). Musimy poprawić trym podwodny, odbywa się to przez, przyklejenie niewielkiej ilości dodatkowej pianki tam gdzie okręt ma przechył, ale powyżej linii wodnej wynurzonego modelu.
– Pierwsza sytuacja. Model zanurzy się, ale będzie miał przechył na dziób lub rufę (zarówno dla pływalności neutralnej jak i ujemnej). Musimy poprawić trym podwodny, odbywa się to przez, przyklejenie niewielkiej ilości dodatkowej pianki tam gdzie okręt ma przechył, ale powyżej linii wodnej wynurzonego modelu.

– Druga sytuacja jest idealna, model równo się zanurzy i będzie trzymał poziom pod wodą. Ewentualnie będzie potrzebować minimalnej korekty.
– Sytuacja trzecia, model nie zanurza się i tu już pojawi się poważny problem, gdyż znów oznacza to błąd w założeniach konstrukcyjnych. Prawdopodobnie WTC zostało zamontowane za wysoko lub użyto za mały zbiornik balastowy. Należy albo poprawić konstrukcję modelu, albo poświęcić linię wodną i odjąć trochę pianki. Okręt będzie zanurzony mocniej na powierzchni, ale unikniemy modyfikacji konstrukcyjnych.
Niestety, ale możliwe jest też, że w tym konkretnym przypadku nie uda się nam osiągnąć sytuacji poprzez manewrowanie ilością pianki, że model jednocześnie będzie pływał z pustym zbiornikiem, i zanurzał się z pełnym. Jest to już na tyle poważny błąd, że należy przeprowadzić pełną przebudowę modelu i założeń z nim związanych.
Podpowiedź: Niewielkie korekty każdego trymu – nawodnego i podwodnego możemy osiągnąć także, poprzez niewielkie przesuwanie balastu lub/i pianki bliżej lub dalej środka ciężkości okrętu. W ten sposób można jednak przeprowadzić bardzo niewielkie korekty, więc takie modyfikacje trymu proponuję zostawić na sam koniec tego procesu. Proces trymowania okrętu jest zdecydowanie najcięższym i najbardziej wymagającym cierpliwości zadaniem jakie stoi przed naszą modelarską stocznią. Bardzo często zdarza się też, że po wytrymowaniu modelu w warunkach „laboratoryjnych” – skrzyniach z wodą, czy domowych wannach i tak jest coś źle co wyjdzie przy pierwszym pływaniu. Na trym ma w końcu wpływ także prędkość modelu i rodzaj wody. Przy pierwszych próbach nad wodą, kiedy potrzebujemy wykonywać w miarę szybko drobne korekty masy modelu bardzo przydaje się plastelina wymieszana z małymi ołowianymi kulkami. Daje ona możliwość bardzo dokładnego wytrymowania modelu – z dokładnością do paru gram. Dodatkowo, dobrze dociśnięta doskonale się trzyma bez potrzeby używania jakiejkolwiek taśmy czy kleju.
Niewielkie korekty każdego trymu – nawodnego i podwodnego możemy osiągnąć także, poprzez niewielkie przesuwanie balastu lub/i pianki bliżej lub dalej środka ciężkości okrętu. W ten sposób można jednak przeprowadzić bardzo niewielkie korekty, więc takie modyfikacje trymu proponuję zostawić na sam koniec tego procesu. Proces trymowania okrętu jest zdecydowanie najcięższym i najbardziej wymagającym cierpliwości zadaniem jakie stoi przed naszą modelarską stocznią. Bardzo często zdarza się też, że po wytrymowaniu modelu w warunkach „laboratoryjnych” – skrzyniach z wodą, czy domowych wannach i tak jest coś źle co wyjdzie przy pierwszym pływaniu. Na trym ma w końcu wpływ także prędkość modelu i rodzaj wody. Przy pierwszych próbach nad wodą, kiedy potrzebujemy wykonywać w miarę szybko drobne korekty masy modelu bardzo przydaje się plastelina wymieszana z małymi ołowianymi kulkami. Daje ona możliwość bardzo dokładnego wytrymowania modelu – z dokładnością do paru gram. Dodatkowo, dobrze dociśnięta doskonale się trzyma bez potrzeby używania jakiejkolwiek taśmy czy kleju.
Na koniec kilka słów niezwiązanych z ściśle z technologią w modelach. Największym problemem z konstruowaniem takiego modelu mają ludzie, którym brak cierpliwości i samozaparcia, a nie Ci którym brakuje wiedzy. Dlatego, jeżeli czytasz to zdanie po przeczytaniu wszystkiego powyżej, to na pewno Ci się uda. Serio.
Kopiowanie i wykorzystywanie materiałów wyłącznie za zgodą autora strony.