Obecnie model Kilo posiada nowy i lepszy cylinder wodoszczelny.
Relację z budowy starego cylindra pozostawiam jako kawałek historii, ostrzegam jednak, że zawarte w większości są nieaktualne.
WTC wer. 1 – Cylinder hermetyczny wersja pierwsza.
Budowę rozpocząłem od zaprojektowania zaślepek i elementów WTC. Planowałem WTC o średnicy 50mm, jest to dość mało, gdyż oznacza to tylko 46mm średnicy wewnętrznej. Plusem takiego wyboru jest jednak olbrzymia uniwersalność konstrukcji. Projektując elementy WTC na rurę 50mm zyskuję szeroki wybór modeli do konwersji. Od tak małych modeli jak Kilo, po modele duże, takie jak Revell GATO.
Projekty zaślepek zostały wykonane od razu w programie 3d, a następnie zleciłem ich wykonanie na tokarce numerycznej. Zaprojektowałem dwa główne typy i jeden „podtyp”. Zaślepka dziobowa z pojedynczym o-ringiem, która została przystosowana do w miarę łatwego, wielokrotnego montażu i demontażu, oraz chodząca ciężej, ale za to dużo odporniejsza na wibracje zaślepka rufowa z podwójnym oringowaniem. Do zaślepki rufowej zamontowany zostanie silnik, stąd różnice konstrukcyjne. Obrazek po prawej przedstawia model 3d rufowej zaślepki na dwa o-ringi.
Kilka dni po wysłaniu pliku odebrałem stalowe prototypy, posłużyły mi one do wykonania silikonowych form, z których to dopiero otrzymam gotowy produkt. Przy planowaniu rozmiaru prototypu dobrze jest wziąć pod uwagę kurczliwość i rodzaj żywicy. Prototypów do odlewów powstało trochę więcej. Elementy montażowe silnika, półeczki na serwomechanizmy, półki na inne elementy itp.
Głównym założeniem była w końcu łatwo powtarzalność elementów, dlatego tak ważne były dobre i dokładne prototypy.
Gdy silikonowe formy były już gotowe, przyszedł czas na wykonie odlewów. Opłaciło się odpowietrzyć silikon w komorze próżniowej (nawet jeśli tylko w takiej domowej roboty), formy są doskonałe. Twarde i nie mają żadnych pęcherzyków powietrza. Jestem z nich naprawdę zadowolony.
Odlewy wyszły doskonale, przy odrobinie dokładności, zaślepki nie wymagają żadnej dodatkowej pracy i są gotowe do użycia prosto z formy. Wystarczy je tylko odpowiednio nawiercić, założyć o-ringi w odpowiednim rozmiarze i element jest gotowy.
Dla pewności wykonałem niewielkie 20 centymetrowe WTC (widoczne na zdjęciu), wypełniłem je ołowianym balastem i zostawiłem w wodzie na parę dni. Po paru dniach, wyłowiłem cylinder, okazało się, że jest całkowicie hermetyczny. Mogłem więc przystąpić do kolejnego etapu budowy.
Budowę WTC rozpocząłem od newralgicznego elementu – zaślepki rufowej, w której należało wywiercić kilka otworów różnej średnicy. Mój projekt zakłada, iż ilość otworów w rufowej zaślepce zależy od rodzaju systemu balastowego jaki zamierzamy użyć. Jest tak, gdyż system oparty na pompie zębatej wymaga dodatkowego serwa i dodatkowego, uszczelnionego wyjścia na popychacz. Wersja z pompą perystaltyczną nie wymaga dodatkowego serwa, a co za tym idzie otworu.
Początkowo, zarówno Kilo jak i SSN-21 Seawolf miały posiadać system oparty właśnie na pompie zębatej. Jednakże, w miarę rozwoju projektu zdecydowałem iż Kilo będzie modelem nowocześniejszym – wyposażonym w pompę perystaltyczną. zmiany te jednak będą widoczne na późniejszych zdjęciach.
Jako uszczelnienie wału użyty został simmering. Na tamten czas planowałem silnik napędowy klasy 400. Na zdjęciu nie widać jednego z elementów mocujących silnik. Jest to specjalny dystans pomiędzy zaślepką, a silnikiem obniżający wibracje. Gdy już powstał pierwszy nawiercony prototyp, zrobiłem sobie z niego stalowy wzór umiejscowienia otworów by nie musieć ich odmierzać przy każdej zaślepce osobno.
Po kilku godzinach nawiercania różnych zaślepek, krążków i wykonaniu odlewów półeczek gotowy był wstępny prototyp WTC z którego byłem bardzo zadowolony. Na ten czas projekt jeszcze zakładał użycie pompy zębatej i silnika szczotkowego klasy 400. Wkrótce jednak miało się to zmienić, gdyż udało mi się zamówić kilka sztuk doskonałych pomp perystaltycznych oraz zaniepokojony coraz większą trudnością w dostępności regulatorów szczotkowych zmodyfikować napęd projektu…
Tak więc, zamiast silnika szczotkowego klasy 400, okręt otrzymał mniejszy, ale dużo mocniejszy silnik trójfazowy 900 obrotów/Volt. Będzie to pierwszy okręt w mojej flocie z napędem bezszczotkowym. Parametry silnika są obiecujące.
Dodatkowo nowy silnik ma od razu wał o średnicy 3mm, co pozwoli na uproszczenie konstrukcji. W przypadku silnika szczotkowego wał ma średnicę 2,3mm i aby pasował do rodzaju uszczelnienia należy na niego nabić rurkę mosiężną o średnicy zewnętrznej 3mm, aby simmering zachował szczelność.
Jak wspomniałem wcześniej, początkowo brałem pod uwagę użycie tylko jednego rodzaju pompy – pompy zębatej, której podstawową wadą jest swobodny przepływ, gdy jest wyłączona. Wymaga to zamontowania dodatkowego zaworu, a więc i dodatkowego serwa które będzie ten zawór obsługiwać. W momencie gdy nadarzyła się okazja zakupu pomp perystaltycznych stwierdziłem, że czemu by nie wprowadzić urozmaicenia – do kilo zamontować pompę perystaltyczną, a do Seawolfa pozostać przy planach użycia pompy zębatej. Pompa perystaltyczna jest jednak trochę większa, a w tym WTC nie ma za wiele miejsca. Na szczęście silnik trójfazowy jest dużo mniejszy niż jego szczotkowy odpowiednik, a nowy system balastowy wymaga o jedno serwo mniej, maszynownia skróciła się więc dość sporo. „Odzyskane” miejsce zostanie więc wykorzystane na pomieszczenie większej pompy.
Wstępne dopasowanie WTC do kadłuba. Na dole widać osprzęt, który zastąpi wcześniej planowane akcesoria.
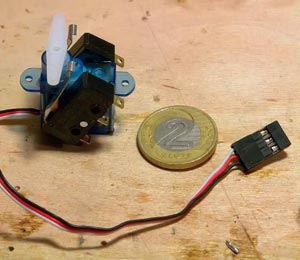
Pompa wymagała odpowiedniego przełącznika, który pozwalał by na jej włączanie i wyłączanie, oczywiście w obydwu kierunkach. Na wykorzystanie regulatora dwukierunkowego jako sterownika pompy w tym modelu nie ma miejsca, zresztą szkoda też pieniędzy. Powstał więc naprawdę mały serwoprzełącznik oparty o serwo „nano” i dwa mikroprzełączniki. Maksymalny prąd to 5A co jest bardzo dużym zapasem. Jak mały jest to przełącznik pokazuje umieszczona dla skali moneta 2zł.
Pompa musiała zostać zmodyfikowana tak, aby zmieściła się do WTC o średnicy wewnętrznej 46mm. Wstępnie została tylko luźno włożona do WTC celem sprawdzenia czy wszystko się zmieści, docelowo będzie posiadać specjalny element mocujący, wykonany przeze mnie, przystosowany do montażu w tym ciasnym cylindrze. Po prawej prezentuję pompę z pościnanymi elementami mocującymi oraz dla porównania jednostka prosto z pudełka.
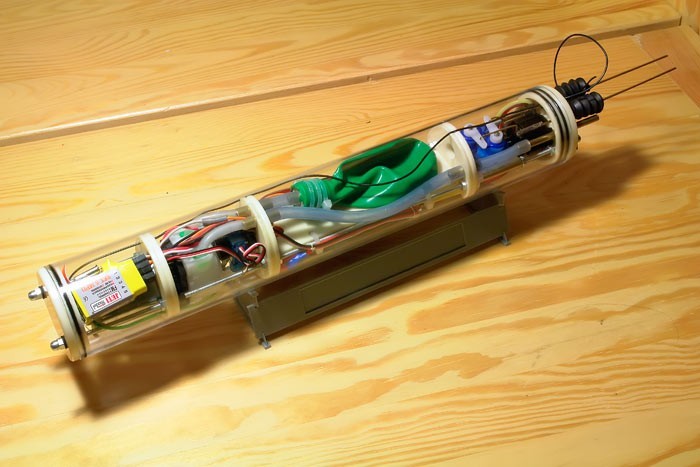
Gdy zebrałem już wszystkie potrzebne elementy – WTC, serwa, silnik, pompę i jej przełącznik oraz akumulator i regulator, przyszedł czas na połączenie tego wszystkiego w całość. Trzeba było opracować prowadzenie kabli zasilających, kabli serw, wężyków z wodą itp. Miałem też w końcu absolutną pewność, że wszystko się zmieści. Wstępne ułożenie prezentuję poniżej. Na pustej półeczce, na samym końcu zostanie zamontowany elastyczny zbiornik balastowy. Od tego momentu, modyfikacje WTC są już niewielkie.
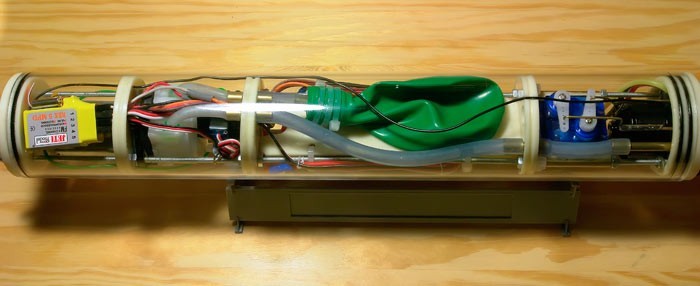
Skończone WTC:
Miejsca w WTC jest naprawdę mało, jest to jednakże w pełni funkcjonalna konstrukcja do małych modeli. Obsługiwanie odbywa się przez 4 kanały. Kontrowersyjnym może wydawać się umieszczenie odbiornika tuż nad silnikiem szczotkowym pompy. Jednakże zdecydowałem się na takie rozwiązanie po dokładnej analizie kilku czynników:
Odbiorników REX firmy Jeti używam od 5 lat i wiem jak bardzo odporne na tego typu zakłócenia są REX-y z tzw. modulacją impulsów (MPD).
Dodatkowo należy pamiętać iż silnik pompy włączany jest tylko od czasu do czasu i nie jest silnikiem napędowym, więc nie ma tu ciągłego generowania zakłóceń.
Jest to też model szkutniczy, nie lotniczy – drobne zadrganie sterów, gdy zbiornik balastowy jest wypełniany wodą nie zrobi tu takich szkód jak mogłoby to zrobić w przypadku szybko lecącego samolotu.
Silnik pompy został dokładnie odkłócony.
Odbiornik zyska jeszcze klatkę faradaja, która dodatkowo go odizoluje.
Antena jest prowadzona z dala od przewodów i została wyprowadzona na zewnątrz.
Gdyby to jednak okazało się za mało (lub gdyby skończyły się REX-y ) można zmodyfikować WTC w 5 minut – stosując zamiast zwykłej zaślepki przygotowaną wcześniej zaślepkę przewężającą i uzyskać parę dodatkowych centymetrów, które umożliwią zamontowanie odbiornika z dala od pompy. Zaślepka ta wykorzystuje dodatkowe miejsce na dziobie okrętu, tam gdzie nie zmieści się już standardowe WTC o średnicy 50mm.
Osobiście bardzo cenię sobie prawidłową linię wodną i nie znoszę, gdy model siedzi za głęboko w wodzie podczas pływania w wynurzeniu. Aby do tego nie doszło należy już przy projektowaniu określić ile WTC „wystaje” ponad powierzchnię wody, gdy model będzie pływał po powierzchni. Gdy już to zrobimy, liczymy objętość tej wystającej ponad powierzchnię przestrzeni. Do prawidłowego działania modelu potrzebny jest zbiornik właśnie o takiej (mniej-więcej) pojemności.
Patrząc na rysunek poniżej nietrudno się domyślić, że im mniej WTC wystaje ponad powierzchnię, tym mniejszy zbiornik balastowy jest nam potrzebny. Stąd dobrym pomysłem jest użycie rury WTC o jak najmniejszej wygodnej dla nas średnicy. Mniejszą rurę zawsze można zamontować niżej lub wyżej i kontrolować w ten sposób jak duża jej ilość wystaje ponad powierzchnię wody. W przypadku WTC 50mm w modelu Kilo, jest to naprawdę niewiele, co pozwoliło zastosować malutki zbiornik balastowy.
Objętość WTC wystająca ponad powierzchnię wody odpowiada wymaganej pojemności zbiornika balastowego.
Krótki filmik z testów funkcjonalności WTC na sucho. Zanim włożę je do wody muszę mieć w końcu pewność, że nic się nie blokuje, że nie powstają żadne niepotrzebne naprężenia i nic się nie wygina, gdy włączymy pompę silnik, czy serwa. Na szczęście WTC przeszło ten test celująco. Bardzo ciekawym spostrzeżeniem jest różnica w charakterystyce startu silnika napędowego, który jest bezszczotkowy, a silnika pompy, który jest natomiast jednostką tradycyjną – szczotkową. Otóż pierwszy, z racji, iż ruch obrotowy wykonują tam tylko elementy idealnie symetryczne, nie powoduję żadnych drgań ani szarpnięć przy starcie. Drugi natomiast, tuż po starcie delikatnie szarpie WTC tak jak wszystkie silniki tego typu w modelach z jednym silnikiem napędowym. Bedzie to mocniej widoczne gdy model rozpocznie manewr zanurzenia, ale całkowicie nieszkodliwe. Ot taka ciekawostka.
Kolejny filmik z testów, tym razem już na mokro. WTC okazało się szczelne. Przeleżało pod wodą 90 min. Każdy model, który przeleży tyle w wodzie i jest w środku suchy uznaję za szczelny. System balastowy działa sprawnie i szybko. WTC doskonale znosi podniesione ciśnienie spowodowane zapełniającym się zbiornikiem balastowym. Miła odmianą jest fakt iż zamiast zbijać drewnianą 2,5 metrową skrzynię do testów (jak to było z moim blisko dwu metrowym Tajfunem), model WTC mogłem przetestować w łazienkowej umywalce.
Kadłub
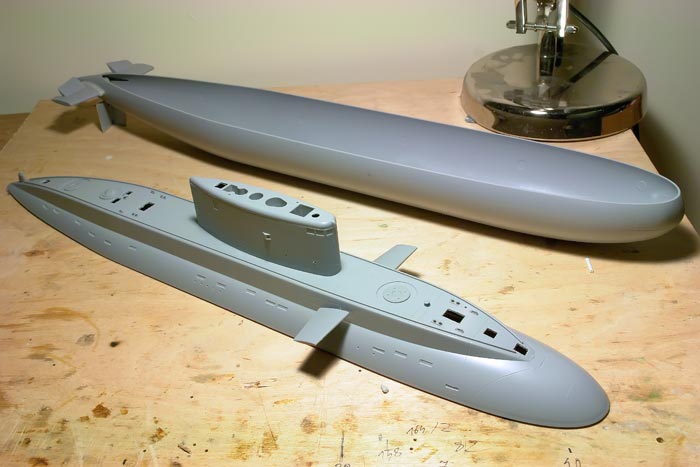
Model po wyjęciu z pudełka mnie dość zaskoczył, przede wszystkim rozmiarem. Spodziewałem się małego długiego cygara w którym po zamontowaniu WTC o średnicy 50mm nie będzie miejsca. Tymczasem w modelu zmieści się nawet WTC o średnicy 60mm. Nie polecam jednak takiego rozwiązania. Większe WTC w tym modelu będzie powodować za dużo problemów z uzyskaniem prawidłowej linii wodnej, dlaczego tak się dzieje wyjaśniłem wcześniej.
Zawartość pudełka jest moim zdaniem dość skromna… Jednakże jest to chyba normalne w przypadku takich modeli. Kadłub w trzech częściach i jedna ramka z detalami. Cóż, taki urok okrętów powojennych, iż mają bardzo mało wystających części. Oczywiście masa mikro elementów, które z chęcią będą się urywać przy jakiś nieudanych manewrach typu za szybkie osiadanie na dnie, otarcie o pomost itp.
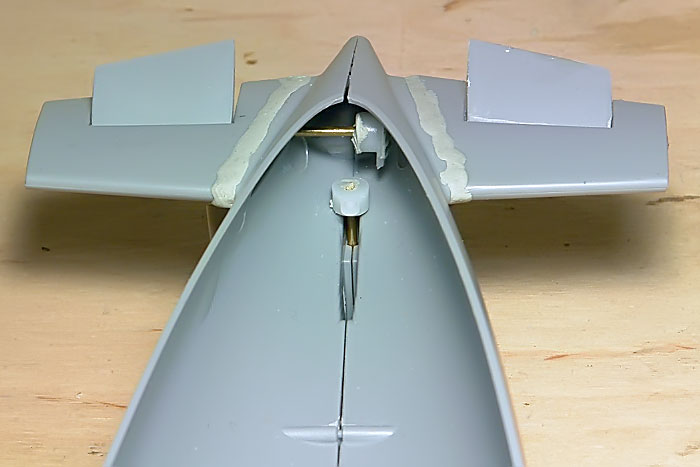
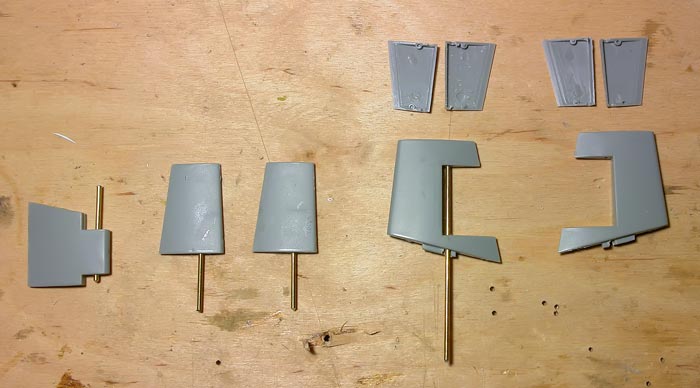
Przystosowanie kadłuba pod RC rozpocząłem od modyfikacji elementów ruchomych. Najpierw przystosowane zostały więc stery. Zaprojektowano je do przyklejenia na stałe, poprzez bardzo delikatne plastikowe mocowania, a nie do sterowania modelem w wodzie. Krótkie i kruche plastikowe wypustki zostały więc pościnane, a ich miejsce zajęły mosiężne pręty. Najtrudniejsze okazało się przystosowanie tylnych sterów głębokości, zależało mi na ich bardzo płynnym ruchu, więc musiałem się trochę pobawić papierem ściernym. W sumie nic trudnego, raczej po prostu mozolna robota.
W czasie gdy łączenia tylnych sterów z mosiężnymi prętami schły, zająłem się przednimi sterami. W ich przypadku było trochę więcej roboty. Z racji małej ilości miejsca dźwignia popychacza mogła być zamontowana tylko pod sterami, więc potrzebna była dodatkowa dźwignia odwracająca ruch popychacza. Dodatkowo ograniczy ona wychylenia tych sterów, które z racji konstrukcji kadłuba mają dużo mniejszy (niż rufowe) zakres ruchu, a pamiętajmy, że zarówno przednie, jak i tylne poruszane tym samym serwem. Przy zachowaniu odpowiedniej dokładności całość chodzi lekko i przyjemnie oraz daje się łatwo regulować.
Następnie przyszedł czas na tylne stery głębokości, do mosiężnych prętów zostały przyklejone od razu dźwignie do których podłączy się cięgna popychaczy. Same cięgna dostaną jeszcze specjalne wyprowadzenia zakończone „oczkami” w które wejdą haczyki popychaczy z WTC. Ułatwi to w wielki stopniu montowanie i demontowanie WTC. Wystarczy raz wszystko ustawić i wyregulować, potem połączenie WTC z kadłubem będzie już banalnie proste i nie powinno zając wiele czasu.
Szpary pomiędzy sterami, a kadłubem zostały zaszpachlowane, ale jeszcze ich nie wyrównałem. W przyszłości będą to ładne gładkie połączenia. Jednakże w tym wypadku i tylko do sterów, by dodatkowo wzmocnić konstrukcję użyłem jako szpachli poxiliny, która ma duże właściwości wiążące, a jest jednocześnie bardzo podatna na obróbkę ścierną.
Kadłub został częściowo sklejony – przykleiłem kiosk i kilka detali kadłuba. Rzeczy delikatne – takie jak peryskopy, anteny i barierki zostawiam na sam koniec by zminimalizować ryzyko ich złamania. Wyciąłem też otwory przelewowe w kadłubie, bynajmniej te na pokładzie i kiosku. Nad wycięciem otworów w burtach się zastanawiam. Obawiam się, że są za małe i nie będą spełniać swojej funkcji, a nawet, że będą zakłócać trym z powodu napięcia powierzchniowego. Nie chciałbym ich też powiększać. Na dzień dzisiejszy nie planuję więc ich wycinać i sądzę, że nie będzie to potrzebne.
Montaż WTC w kadłubie
Mając skończone WTC i kadłub przystosowany już pod konwersję RC, przyszedł czas na połączenie obydwu elementów w jedną funkcjonalną całość. Musiałem obmyśleć taką metodę łączenia WTC z kadłubem by nie zabierało to dużo czasu, a jednocześnie dawało pewne i dokładne połączenia. Po testach sterów „na sucho” przyszedł czas na testy systemu zanurzenia już w wodzie. Model przeszedł je dobrze, co widać na załączonym wideo. Gdy już go pomaluję i skończę przyklejać wszystkie detale, myślę, że nie będzie problemów z dokładnym i równym wytrymowanie tej mini jednostki.
Komentarze są wyłączone.
Modelepodwodne.pl:
Strona Istnieje nieprzerwanie od 2008 roku, a od grudnia 2015 funkcjonuje na platformie obsługującej także urządzenia przenośne.
Od 2018 strona obsługuje SSL.
Stronę stworzyłem, by propagować w kraju modelarstwo podwodne RC (radio control).
Modelarstwem radiowym zainteresowałem się jeszcze w latach 90-tych. W czasach, gdy królowały akumulatory Ni-Cd oraz PB :)
Czasem piszę artykuły dla prasy tradycyjnej, można je przeczytać np: w Modelarstwie Okrętowym.

 Budowę rozpocząłem od zaprojektowania zaślepek i elementów WTC. Planowałem WTC o średnicy 50mm, jest to dość mało, gdyż oznacza to tylko 46mm średnicy wewnętrznej. Plusem takiego wyboru jest jednak olbrzymia uniwersalność konstrukcji. Projektując elementy WTC na rurę 50mm zyskuję szeroki wybór modeli do konwersji. Od tak małych modeli jak Kilo, po modele duże, takie jak Revell GATO.
Budowę rozpocząłem od zaprojektowania zaślepek i elementów WTC. Planowałem WTC o średnicy 50mm, jest to dość mało, gdyż oznacza to tylko 46mm średnicy wewnętrznej. Plusem takiego wyboru jest jednak olbrzymia uniwersalność konstrukcji. Projektując elementy WTC na rurę 50mm zyskuję szeroki wybór modeli do konwersji. Od tak małych modeli jak Kilo, po modele duże, takie jak Revell GATO. Kilka dni po wysłaniu pliku odebrałem stalowe prototypy, posłużyły mi one do wykonania silikonowych form, z których to dopiero otrzymam gotowy produkt. Przy planowaniu rozmiaru prototypu dobrze jest wziąć pod uwagę kurczliwość i rodzaj żywicy. Prototypów do odlewów powstało trochę więcej. Elementy montażowe silnika, półeczki na serwomechanizmy, półki na inne elementy itp.
Kilka dni po wysłaniu pliku odebrałem stalowe prototypy, posłużyły mi one do wykonania silikonowych form, z których to dopiero otrzymam gotowy produkt. Przy planowaniu rozmiaru prototypu dobrze jest wziąć pod uwagę kurczliwość i rodzaj żywicy. Prototypów do odlewów powstało trochę więcej. Elementy montażowe silnika, półeczki na serwomechanizmy, półki na inne elementy itp.
 Odlewy wyszły doskonale, przy odrobinie dokładności, zaślepki nie wymagają żadnej dodatkowej pracy i są gotowe do użycia prosto z formy. Wystarczy je tylko odpowiednio nawiercić, założyć o-ringi w odpowiednim rozmiarze i element jest gotowy.
Odlewy wyszły doskonale, przy odrobinie dokładności, zaślepki nie wymagają żadnej dodatkowej pracy i są gotowe do użycia prosto z formy. Wystarczy je tylko odpowiednio nawiercić, założyć o-ringi w odpowiednim rozmiarze i element jest gotowy. Dla pewności wykonałem niewielkie 20 centymetrowe WTC (widoczne na zdjęciu), wypełniłem je ołowianym balastem i zostawiłem w wodzie na parę dni. Po paru dniach, wyłowiłem cylinder, okazało się, że jest całkowicie hermetyczny. Mogłem więc przystąpić do kolejnego etapu budowy.
Dla pewności wykonałem niewielkie 20 centymetrowe WTC (widoczne na zdjęciu), wypełniłem je ołowianym balastem i zostawiłem w wodzie na parę dni. Po paru dniach, wyłowiłem cylinder, okazało się, że jest całkowicie hermetyczny. Mogłem więc przystąpić do kolejnego etapu budowy. Budowę WTC rozpocząłem od newralgicznego elementu – zaślepki rufowej, w której należało wywiercić kilka otworów różnej średnicy. Mój projekt zakłada, iż ilość otworów w rufowej zaślepce zależy od rodzaju systemu balastowego jaki zamierzamy użyć. Jest tak, gdyż system oparty na pompie zębatej wymaga dodatkowego serwa i dodatkowego, uszczelnionego wyjścia na popychacz. Wersja z pompą perystaltyczną nie wymaga dodatkowego serwa, a co za tym idzie otworu.
Budowę WTC rozpocząłem od newralgicznego elementu – zaślepki rufowej, w której należało wywiercić kilka otworów różnej średnicy. Mój projekt zakłada, iż ilość otworów w rufowej zaślepce zależy od rodzaju systemu balastowego jaki zamierzamy użyć. Jest tak, gdyż system oparty na pompie zębatej wymaga dodatkowego serwa i dodatkowego, uszczelnionego wyjścia na popychacz. Wersja z pompą perystaltyczną nie wymaga dodatkowego serwa, a co za tym idzie otworu.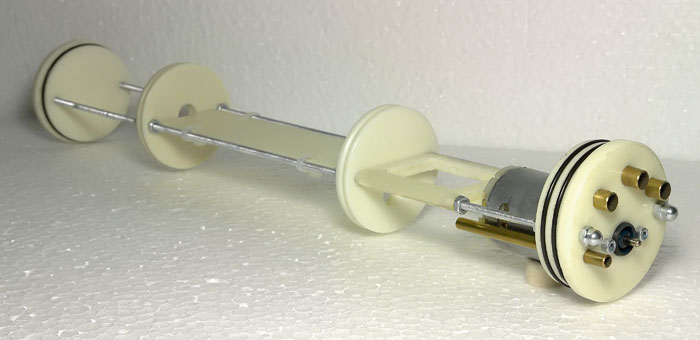
 Tak więc, zamiast silnika szczotkowego klasy 400, okręt otrzymał mniejszy, ale dużo mocniejszy silnik trójfazowy 900 obrotów/Volt. Będzie to pierwszy okręt w mojej flocie z napędem bezszczotkowym. Parametry silnika są obiecujące.
Tak więc, zamiast silnika szczotkowego klasy 400, okręt otrzymał mniejszy, ale dużo mocniejszy silnik trójfazowy 900 obrotów/Volt. Będzie to pierwszy okręt w mojej flocie z napędem bezszczotkowym. Parametry silnika są obiecujące. Jak wspomniałem wcześniej, początkowo brałem pod uwagę użycie tylko jednego rodzaju pompy – pompy zębatej, której podstawową wadą jest swobodny przepływ, gdy jest wyłączona. Wymaga to zamontowania dodatkowego zaworu, a więc i dodatkowego serwa które będzie ten zawór obsługiwać. W momencie gdy nadarzyła się okazja zakupu pomp perystaltycznych stwierdziłem, że czemu by nie wprowadzić urozmaicenia – do kilo zamontować pompę perystaltyczną, a do Seawolfa pozostać przy planach użycia pompy zębatej. Pompa perystaltyczna jest jednak trochę większa, a w tym WTC nie ma za wiele miejsca. Na szczęście silnik trójfazowy jest dużo mniejszy niż jego szczotkowy odpowiednik, a nowy system balastowy wymaga o jedno serwo mniej, maszynownia skróciła się więc dość sporo. „Odzyskane” miejsce zostanie więc wykorzystane na pomieszczenie większej pompy.
Jak wspomniałem wcześniej, początkowo brałem pod uwagę użycie tylko jednego rodzaju pompy – pompy zębatej, której podstawową wadą jest swobodny przepływ, gdy jest wyłączona. Wymaga to zamontowania dodatkowego zaworu, a więc i dodatkowego serwa które będzie ten zawór obsługiwać. W momencie gdy nadarzyła się okazja zakupu pomp perystaltycznych stwierdziłem, że czemu by nie wprowadzić urozmaicenia – do kilo zamontować pompę perystaltyczną, a do Seawolfa pozostać przy planach użycia pompy zębatej. Pompa perystaltyczna jest jednak trochę większa, a w tym WTC nie ma za wiele miejsca. Na szczęście silnik trójfazowy jest dużo mniejszy niż jego szczotkowy odpowiednik, a nowy system balastowy wymaga o jedno serwo mniej, maszynownia skróciła się więc dość sporo. „Odzyskane” miejsce zostanie więc wykorzystane na pomieszczenie większej pompy.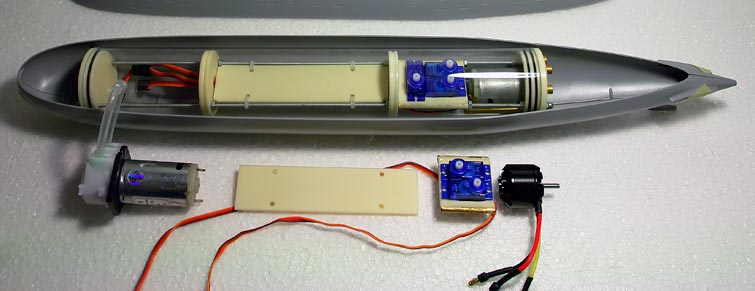
 Pompa wymagała odpowiedniego przełącznika, który pozwalał by na jej włączanie i wyłączanie, oczywiście w obydwu kierunkach. Na wykorzystanie regulatora dwukierunkowego jako sterownika pompy w tym modelu nie ma miejsca, zresztą szkoda też pieniędzy. Powstał więc naprawdę mały serwoprzełącznik oparty o serwo „nano” i dwa mikroprzełączniki. Maksymalny prąd to 5A co jest bardzo dużym zapasem. Jak mały jest to przełącznik pokazuje umieszczona dla skali moneta 2zł.
Pompa wymagała odpowiedniego przełącznika, który pozwalał by na jej włączanie i wyłączanie, oczywiście w obydwu kierunkach. Na wykorzystanie regulatora dwukierunkowego jako sterownika pompy w tym modelu nie ma miejsca, zresztą szkoda też pieniędzy. Powstał więc naprawdę mały serwoprzełącznik oparty o serwo „nano” i dwa mikroprzełączniki. Maksymalny prąd to 5A co jest bardzo dużym zapasem. Jak mały jest to przełącznik pokazuje umieszczona dla skali moneta 2zł. Pompa musiała zostać zmodyfikowana tak, aby zmieściła się do WTC o średnicy wewnętrznej 46mm. Wstępnie została tylko luźno włożona do WTC celem sprawdzenia czy wszystko się zmieści, docelowo będzie posiadać specjalny element mocujący, wykonany przeze mnie, przystosowany do montażu w tym ciasnym cylindrze. Po prawej prezentuję pompę z pościnanymi elementami mocującymi oraz dla porównania jednostka prosto z pudełka.
Pompa musiała zostać zmodyfikowana tak, aby zmieściła się do WTC o średnicy wewnętrznej 46mm. Wstępnie została tylko luźno włożona do WTC celem sprawdzenia czy wszystko się zmieści, docelowo będzie posiadać specjalny element mocujący, wykonany przeze mnie, przystosowany do montażu w tym ciasnym cylindrze. Po prawej prezentuję pompę z pościnanymi elementami mocującymi oraz dla porównania jednostka prosto z pudełka.

 Gdyby to jednak okazało się za mało (lub gdyby skończyły się REX-y ) można zmodyfikować WTC w 5 minut – stosując zamiast zwykłej zaślepki przygotowaną wcześniej zaślepkę przewężającą i uzyskać parę dodatkowych centymetrów, które umożliwią zamontowanie odbiornika z dala od pompy. Zaślepka ta wykorzystuje dodatkowe miejsce na dziobie okrętu, tam gdzie nie zmieści się już standardowe WTC o średnicy 50mm.
Gdyby to jednak okazało się za mało (lub gdyby skończyły się REX-y ) można zmodyfikować WTC w 5 minut – stosując zamiast zwykłej zaślepki przygotowaną wcześniej zaślepkę przewężającą i uzyskać parę dodatkowych centymetrów, które umożliwią zamontowanie odbiornika z dala od pompy. Zaślepka ta wykorzystuje dodatkowe miejsce na dziobie okrętu, tam gdzie nie zmieści się już standardowe WTC o średnicy 50mm.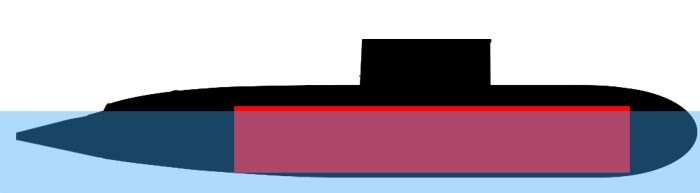


 W czasie gdy łączenia tylnych sterów z mosiężnymi prętami schły, zająłem się przednimi sterami. W ich przypadku było trochę więcej roboty. Z racji małej ilości miejsca dźwignia popychacza mogła być zamontowana tylko pod sterami, więc potrzebna była dodatkowa dźwignia odwracająca ruch popychacza. Dodatkowo ograniczy ona wychylenia tych sterów, które z racji konstrukcji kadłuba mają dużo mniejszy (niż rufowe) zakres ruchu, a pamiętajmy, że zarówno przednie, jak i tylne poruszane tym samym serwem. Przy zachowaniu odpowiedniej dokładności całość chodzi lekko i przyjemnie oraz daje się łatwo regulować.
W czasie gdy łączenia tylnych sterów z mosiężnymi prętami schły, zająłem się przednimi sterami. W ich przypadku było trochę więcej roboty. Z racji małej ilości miejsca dźwignia popychacza mogła być zamontowana tylko pod sterami, więc potrzebna była dodatkowa dźwignia odwracająca ruch popychacza. Dodatkowo ograniczy ona wychylenia tych sterów, które z racji konstrukcji kadłuba mają dużo mniejszy (niż rufowe) zakres ruchu, a pamiętajmy, że zarówno przednie, jak i tylne poruszane tym samym serwem. Przy zachowaniu odpowiedniej dokładności całość chodzi lekko i przyjemnie oraz daje się łatwo regulować.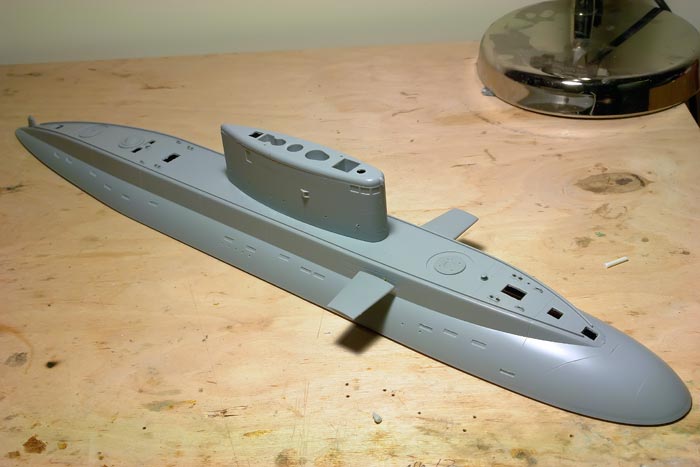


 Następnie przyszedł czas na tylne stery głębokości, do mosiężnych prętów zostały przyklejone od razu dźwignie do których podłączy się cięgna popychaczy. Same cięgna dostaną jeszcze specjalne wyprowadzenia zakończone „oczkami” w które wejdą haczyki popychaczy z WTC. Ułatwi to w wielki stopniu montowanie i demontowanie WTC. Wystarczy raz wszystko ustawić i wyregulować, potem połączenie WTC z kadłubem będzie już banalnie proste i nie powinno zając wiele czasu.
Następnie przyszedł czas na tylne stery głębokości, do mosiężnych prętów zostały przyklejone od razu dźwignie do których podłączy się cięgna popychaczy. Same cięgna dostaną jeszcze specjalne wyprowadzenia zakończone „oczkami” w które wejdą haczyki popychaczy z WTC. Ułatwi to w wielki stopniu montowanie i demontowanie WTC. Wystarczy raz wszystko ustawić i wyregulować, potem połączenie WTC z kadłubem będzie już banalnie proste i nie powinno zając wiele czasu.